
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese
| Citation: | REN Hang, SUN Zhichao, YANG Jianyu, et al. A task allocation method for swarm UAV SAR based on low redundancy chromosome encoding[J]. Journal of Radars, 2025, 14(5): 1153–1169. doi: 10.12000/JR24218

|
A Task Allocation Method for Swarm UAV SAR Based on Low Redundancy Chromosome Encoding
DOI: 10.12000/JR24218 CSTR: 32380.14.JR24218
More Information-
Abstract
This paper addresses the task allocation problem in swarm Unmanned Aerial Vehicle (UAV) Synthetic Aperture Radar (SAR) systems and proposes a method based on low-redundancy chromosome encoding. It starts with a thorough analysis of the relationship between imaging performance and geometric configurations in SAR imaging tasks and accordingly constructs a path function that reflects imaging resolution performance. The task allocation problem is then formulated as a generalized, balanced multiple traveling salesman problem. To enhance the search efficiency and accuracy of the algorithm, a two-part chromosome encoding scheme with low redundancy is introduced. Additionally, considering possible unexpected situations and dynamic changes in practical applications, a dynamic task allocation strategy integrating a contract net protocol and attention mechanisms is proposed. This method can flexibly adjust task allocation strategies based on actual conditions, ensuring the robustness of the system. Simulation experiments validate the effectiveness of the proposed method. -

-
References
[1] 王岩飞, 刘畅, 詹学丽, 等. 无人机载合成孔径雷达系统技术与应用[J]. 雷达学报, 2016, 5(4): 333–349. doi: 10.12000/JR16089.WANG Yanfei, LIU Chang, ZHAN Xueli, et al. Technology and applications of UAV synthetic aperture radar system[J]. Journal of Radars, 2016, 5(4): 333–349. doi: 10.12000/JR16089.[2] 杨小鹏, 马忠杰, 钟世超, 等. 基于遗传算法的无人机载穿墙三维SAR航迹规划方法[J]. 雷达学报(中英文), 2024, 13(4): 731–746. doi: 10.12000/JR24068.YANG Xiaopeng, MA Zhongjie, ZHONG Shichao, et al. Trajectory planning method for UAV-through-the-wall 3D SAR based on a genetic algorithm[J]. Journal of Radars, 2024, 13(4): 731–746. doi: 10.12000/JR24068.[3] RUNKLE P, NGUYEN L H, MCCLELLAN J H, et al. Multi-aspect target detection for SAR imagery using hidden Markov models[J]. IEEE Transactions on Geoscience and Remote Sensing, 2001, 39(1): 46–55. doi: 10.1109/36.898664.[4] PAPSON S and NARAYANAN R M. Classification via the shadow region in SAR imagery[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(2): 969–980. doi: 10.1109/TAES.2012.6178042.[5] ZHANG Haichao, NASRABADI N M, ZHANG Yanning, et al. Multi-view automatic target recognition using joint sparse representation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(3): 2481–2497. doi: 10.1109/TAES.2012.6237604.[6] SCHREIBER E, HEINZEL A, PEICHL M, et al. Advanced buried object detection by multichannel, UAV/drone carried synthetic aperture radar[C]. 2019 13th European Conference on Antennas and Propagation, Krakow, Poland, 2019: 1–5.[7] DING Manlai, DING Chibiao, TANG Li, et al. A W-band 3-D integrated mini-SAR system with high imaging resolution on UAV platform[J]. IEEE Access, 2020, 8: 113601–113609. doi: 10.1109/ACCESS.2020.3003273.[8] CHEN Ming, WANG Huibin, CHANG C Y, et al. SIDR: A swarm intelligence-based damage-resilient mechanism for UAV swarm networks[J]. IEEE Access, 2020, 8: 77089–77105. doi: 10.1109/ACCESS.2020.2989614.[9] ZHOU Yongkun, RAO Bin, and WANG Wei. UAV swarm intelligence: Recent advances and future trends[J]. IEEE Access, 2020, 8: 183856–183878. doi: 10.1109/ACCESS.2020.3028865.[10] WALTERSCHEID I and BRENNER A R. Multistatic and multi-aspect SAR data acquisition to improve image interpretation[C]. 2013 IEEE International Geoscience and Remote Sensing Symposium, Melbourne, Australia, 2013: 4194–4197. doi: 10.1109/IGARSS.2013.6723758.[11] PETERSON E H, FOTOPOULOS G, SCHMITT A, et al. Registration of multi-frequency SAR imagery using phase correlation methods[C]. 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, Canada, 2011: 3708–3711. doi: 10.1109/IGARSS.2011.6050030.[12] SUN Zhichao, WU Junjie, PEI Jifang, et al. Inclined geosynchronous spaceborne-airborne bistatic SAR: Performance analysis and mission design[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(1): 343–357. doi: 10.1109/TGRS.2015.2457034.[13] REN Hang, SUN Zhichao, YANG Jianyu, et al. Swarm UAV SAR for 3-D imaging: System analysis and sensing matrix design[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5238316. doi: 10.1109/TGRS.2022.3221775.[14] REN Hang, SUN Zhichao, YANG Jianyu, et al. A hybrid resolution enhancement framework for swarm UAV SAR based on cost-effective formation strategy[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5200216. doi: 10.1109/TGRS.2023.3338247.[15] 毕文豪, 张梦琦, 高飞, 等. 无人机集群任务分配技术研究综述[J]. 系统工程与电子技术, 2024, 46(3): 922–934. doi: 10.12305/j.issn.1001-506X.2024.03.18.BI Wenhao, ZHANG Mengqi, GAO Fei, et al. Review on UAV swarm task allocation technology[J]. Systems Engineering and Electronics, 2024, 46(3): 922–934. doi: 10.12305/j.issn.1001-506X.2024.03.18.[16] 袁野, 杨剑, 刘辛雨, 等. 基于任务效用最大化的多雷达协同任务规划算法[J]. 雷达学报, 2023, 12(3): 550–562. doi: 10.12000/JR23013.YUAN Ye, YANG Jian, LIU Xinyu, et al. Multiradar collaborative task planning based on task utility maximization[J]. Journal of Radars, 2023, 12(3): 550–562. doi: 10.12000/JR23013.[17] 沈林成, 陈璟, 王楠. 飞行器任务规划技术综述[J]. 航空学报, 2014, 35(3): 593–606. doi: 10.7527/S1000-6893.2013.0500.SHEN Lincheng, CHEN Jing, and WANG Nan. Overview of air vehicle mission planning techniques[J]. Acta Aeronautica et Astronautica Sinica, 2014, 35(3): 593–606. doi: 10.7527/S1000-6893.2013.0500.[18] WANG Zhu, LIU Li, LONG Teng, et al. Multi-UAV reconnaissance task allocation for heterogeneous targets using an opposition-based genetic algorithm with double-chromosome encoding[J]. Chinese Journal of Aeronautics, 2018, 31(2): 339–350. doi: 10.1016/j.cja.2017.09.005.[19] JIA Zhenyue, YU Jianqiao, AI Xiaolin, et al. Cooperative multiple task assignment problem with stochastic velocities and time windows for heterogeneous unmanned aerial vehicles using a genetic algorithm[J]. Aerospace Science and Technology, 2018, 76: 112–125. doi: 10.1016/j.ast.2018.01.025.[20] XU Guangtong, LIU Li, LONG Teng, et al. Cooperative multiple task assignment considering precedence constraints using multi-chromosome encoded genetic algorithm[C]. 2018 AIAA Guidance, Navigation, and Control Conference, Kissimmee, Florida, 2018. doi: 10.2514/6.2018-1859.[21] 林君灿, 贾高伟, 侯中喜. 异构UAV编队反雷达作战中任务分配方法[J]. 系统工程与电子技术, 2018, 40(9): 1986–1992. doi: 10.3969/j.issn.1001-506X.2018.09.14.LIN Juncan, JIA Gaowei, and HOU Zhongxi. Research on task assignment of heterogeneous UAV formation in the anti-radar combat[J]. Systems Engineering and Electronics, 2018, 40(9): 1986–1992. doi: 10.3969/j.issn.1001-506X.2018.09.14.[22] 杜继永, 张凤鸣, 杨骥, 等. 多UCAV协同任务分配模型及粒子群算法求解[J]. 控制与决策, 2012, 27(11): 1751–1755. doi: 10.13195/j.cd.2012.11.154.dujy.005.DU Jiyong, ZHANG Fengming, YANG Ji, et al. Cooperative task assignment for multiple UCAV using particle swarm optimization[J]. Control and Decision, 2012, 27(11): 1751–1755. doi: 10.13195/j.cd.2012.11.154.dujy.005.[23] LIM W H and ISA N A. Particle swarm optimization with dual-level task allocation[J]. Engineering Applications of Artificial Intelligence, 2015, 38: 88–110. doi: 10.1016/j.engappai.2014.10.022.[24] 张大琳, 易伟, 孔令讲. 面向组网雷达干扰任务的多干扰机资源联合优化分配方法[J]. 雷达学报, 2021, 10(4): 595–606. doi: 10.12000/JR21071.ZHANG Dalin, YI Wei, and KONG Lingjiang. Optimal joint allocation of multijammer resources for jamming netted radar system[J]. Journal of Radars, 2021, 10(4): 595–606. doi: 10.12000/JR21071.[25] CONG Rui, QI Juntong, WU Chong, et al. Multi-UAVs cooperative detection based on improved NSGA-II algorithm[C]. 2020 39th Chinese Control Conference, Shenyang, China, 2020: 1524–1529. doi: 10.23919/CCC50068.2020.9188354.[26] ZOU Dexuan, LIU Haikuan, GAO Liqun, et al. An improved differential evolution algorithm for the task assignment problem[J]. Engineering Applications of Artificial Intelligence, 2011, 24(4): 616–624. doi: 10.1016/j.engappai.2010.12.002.[27] HUO Lisu, ZHU Jianghan, WU Guohua, et al. A novel simulated annealing based strategy for balanced UAV task assignment and path planning[J]. Sensors, 2020, 20(17): 4769. doi: 10.3390/s20174769.[28] 杨玮, 李然, 张堃. 基于变邻域模拟退火算法的多自动导引车任务分配优化[J]. 计算机应用, 2021, 41(10): 3056–3062. doi: 10.11772/j.issn.1001-9081.2020121919.YANG Wei, LI Ran, and ZHANG Kun. Task allocation optimization for automated guided vehicles based on variable neighborhood simulated annealing algorithm[J]. Journal of Computer Applications, 2021, 41(10): 3056–3062. doi: 10.11772/j.issn.1001-9081.2020121919.[29] SUN Zhichao, REN Hang, SUN Huarui, et al. Terminal trajectory planning for synthetic aperture radar imaging guidance based on chronological iterative search framework[J]. IEEE Transactions on Cybernetics, 2024, 54(5): 3065–3078. doi: 10.1109/TCYB.2022.3231974.[30] SUN Zhichao, WU Junjie, YEN G G, et al. Performance analysis and system implementation for energy-efficient passive UAV radar imaging system[J]. IEEE Transactions on Vehicular Technology, 2023, 72(8): 9938–9955. doi: 10.1109/TVT.2023.3260876.[31] SUN Zhichao, YEN G G, WU Junjie, et al. Mission planning for energy-efficient passive UAV radar imaging system based on substage division collaborative search[J]. IEEE Transactions on Cybernetics, 2023, 53(1): 275–288. doi: 10.1109/TCYB.2021.3090662.[32] HU Cheng, CHEN Zhiyang, DONG Xichao, et al. Multistatic geosynchronous SAR resolution analysis and grating lobe suppression based on array spatial ambiguity function[J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(9): 6020–6038. doi: 10.1109/TGRS.2020.2969573.[33] 王朝辉, 徐瑞, 李朝玉, 等. 加权负载均衡合同网大规模星座任务分配方法[J]. 航天控制, 2023, 41(4): 59–66. doi: 10.16804/j.cnki.issn1006-3242.2023.04.010.WANG Zhaohui, XU Rui, LI Zhaoyu, et al. Large-scale constellation task allocation method through weighted load balancing contract network[J]. Aerospace Control, 2023, 41(4): 59–66. doi: 10.16804/j.cnki.issn1006-3242.2023.04.010.[34] 陈杰, 黄志祥, 夏润繁, 等. 大规模多类SAR目标检测数据集-1.0[J/OL]. 雷达学报, 2022. https://radars.ac.cn/web/data/getData?dataType=MSAR.CHEN Jie, HUANG Zhixiang, XIA Runfan, et al. Large-scale multi-class SAR image target detection dataset-1.0[J/OL]. Journal of Radars, 2022. https://radars.ac.cn/web/data/getData?dataType=MSAR. -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:





- Figure 1. Scenario of task allocation for swarm UAV SAR
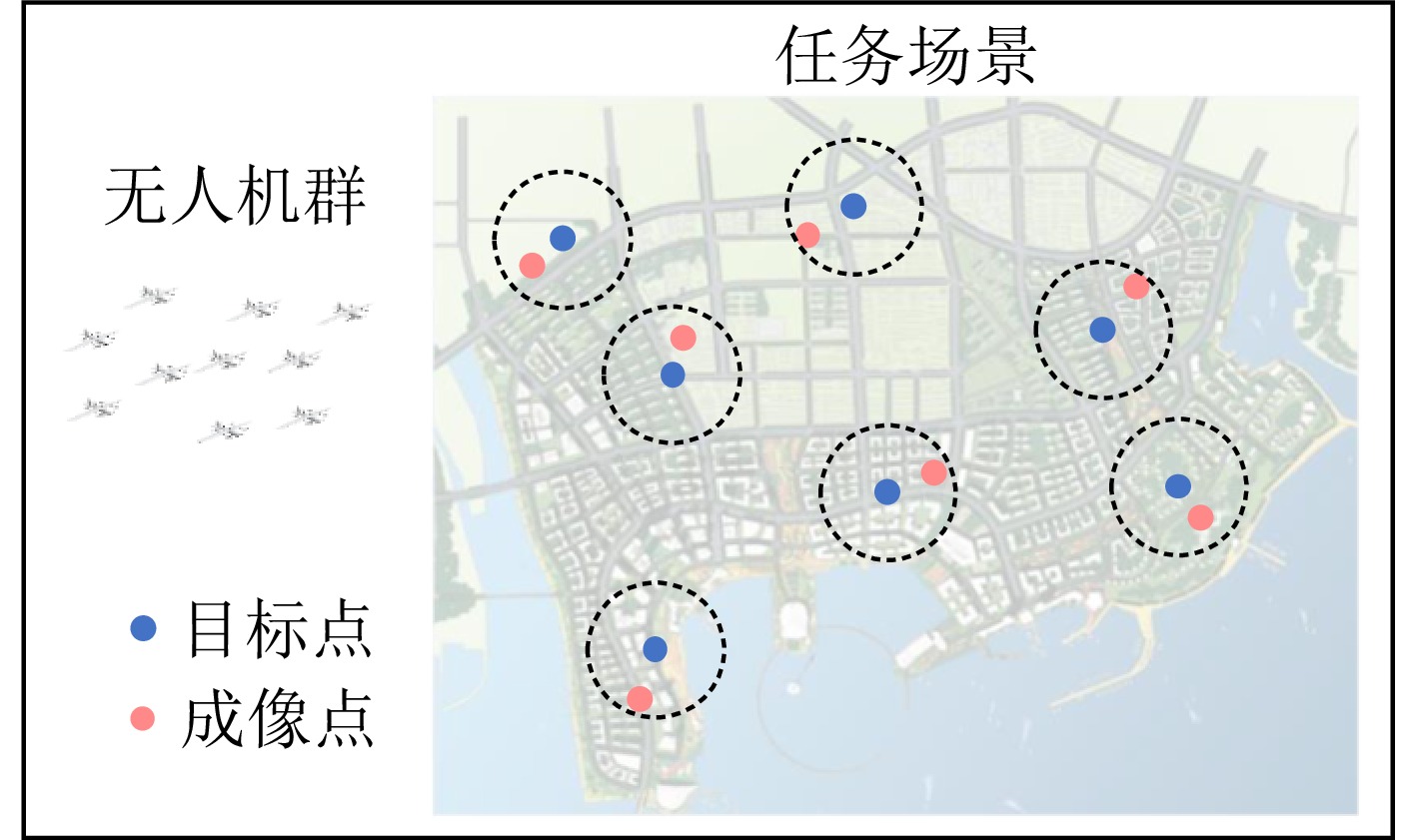
- Figure 2. Geometric observation diagram
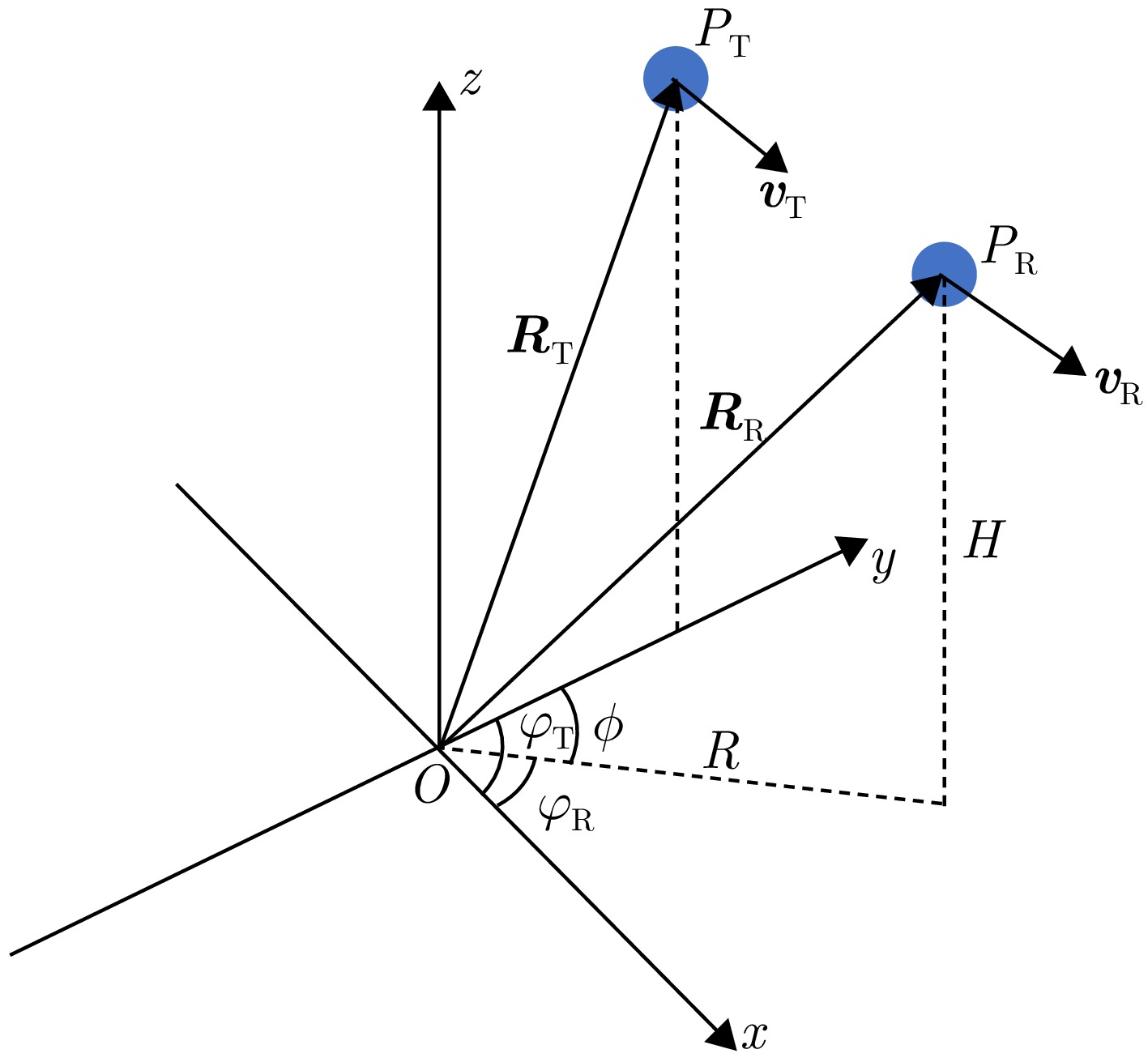
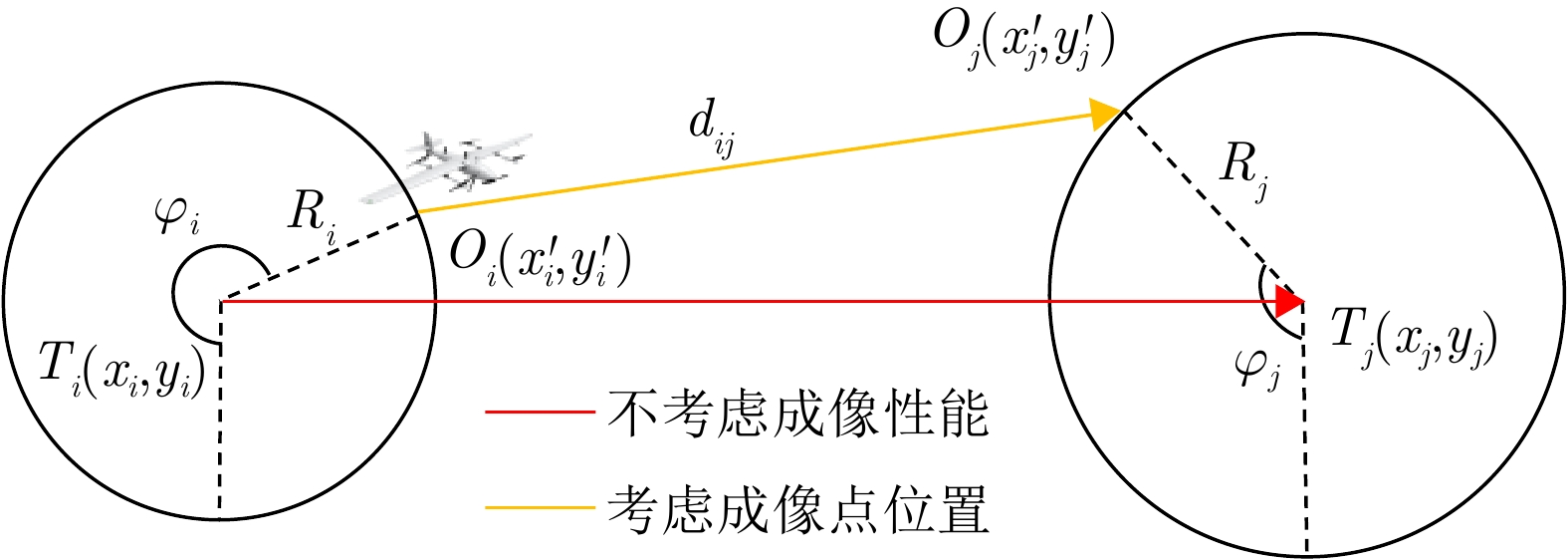
- Figure 3. Flight path diagram
- Figure 4. Example of single chromosome coding scheme
- Figure 5. Example of dual chromosome coding scheme
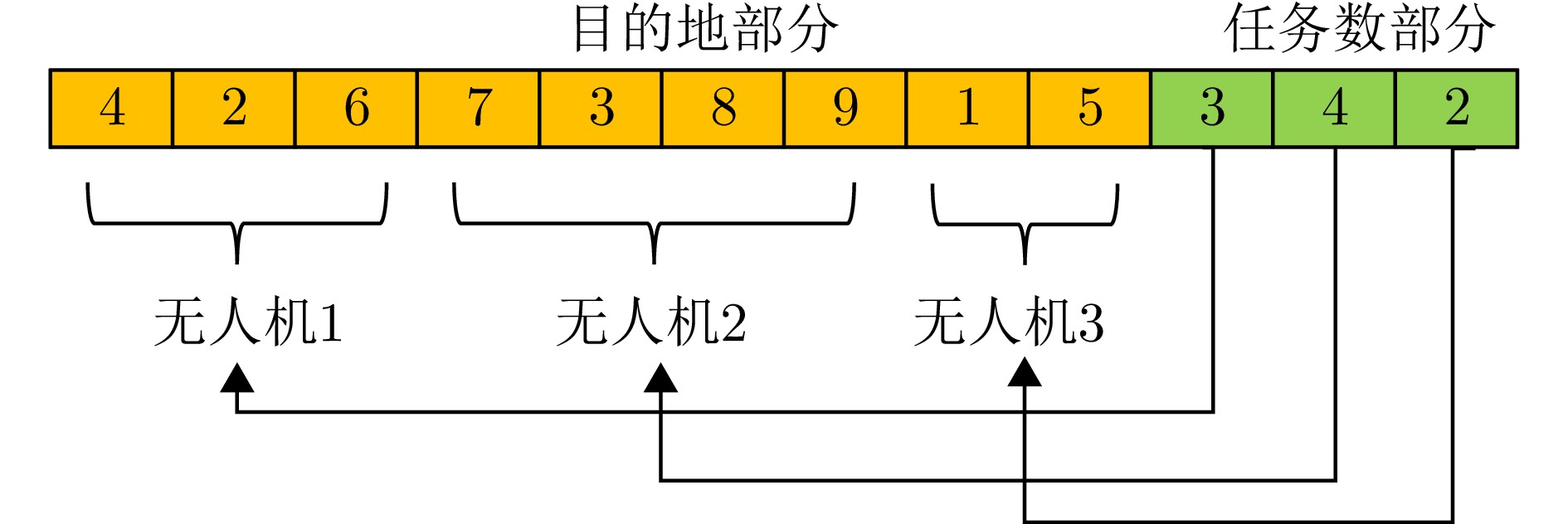
- Figure 6. Example of two-part chromosome coding scheme
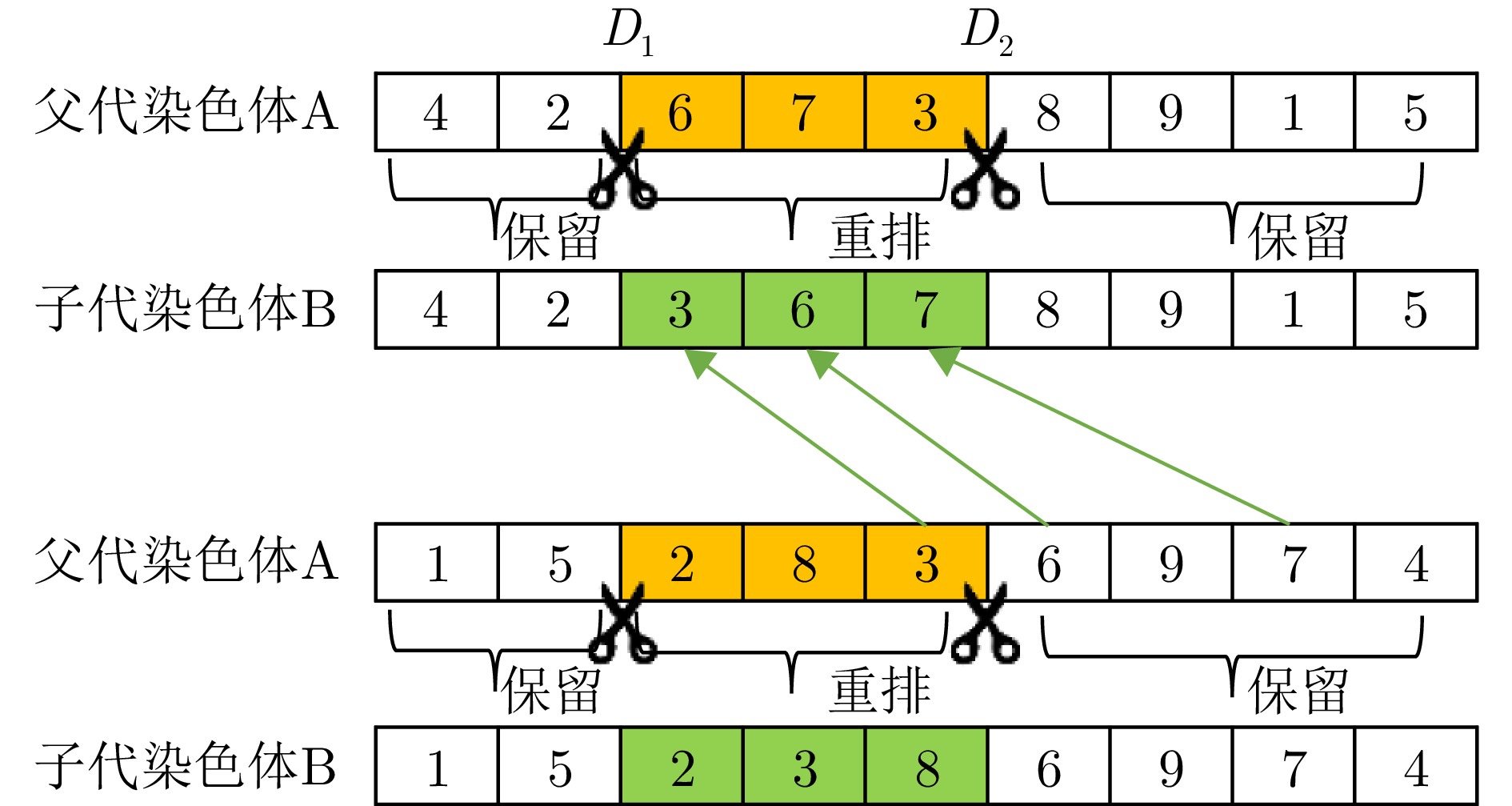
- Figure 7. Two-point central crossover
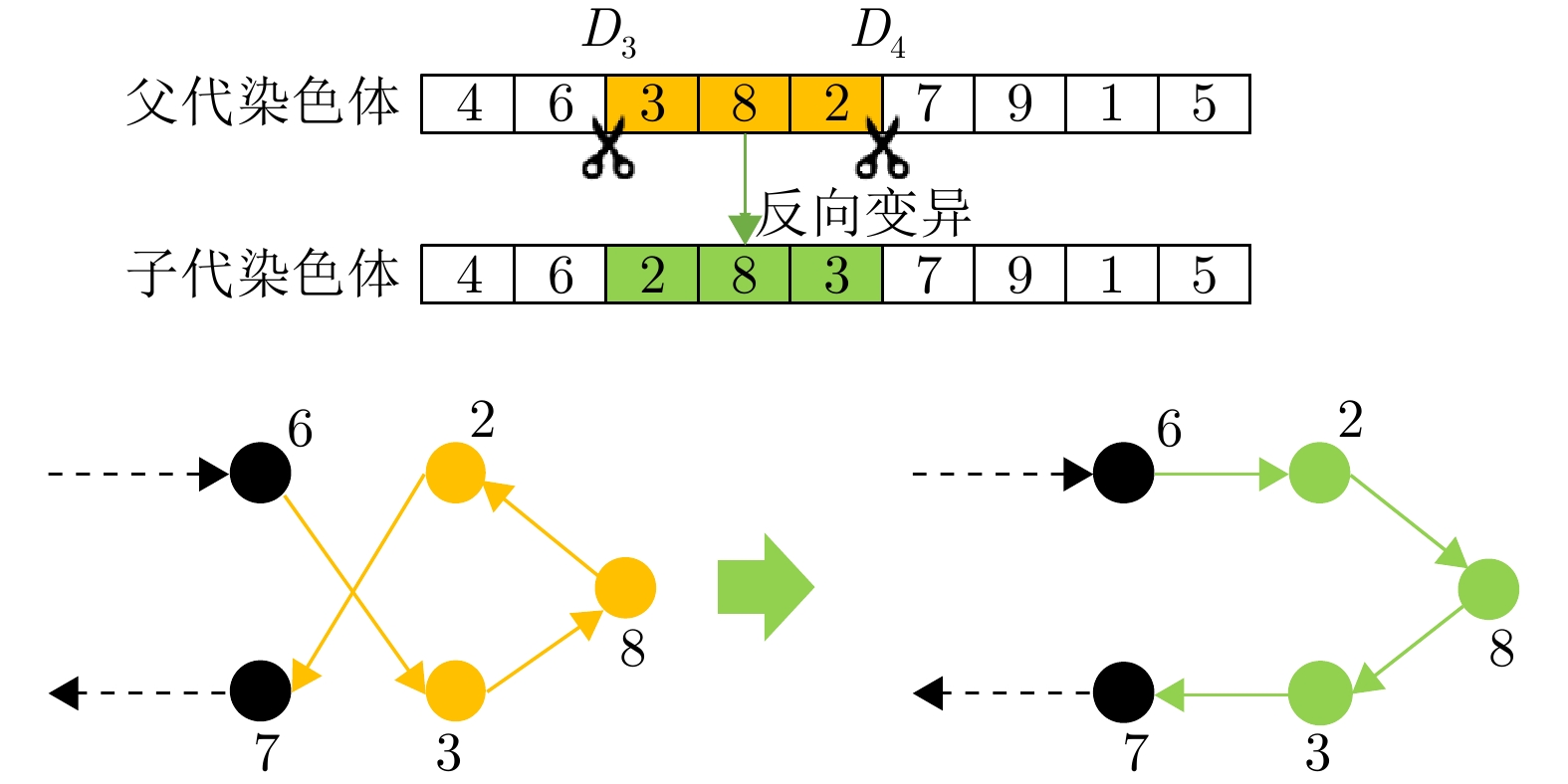
- Figure 8. Inverse mutation
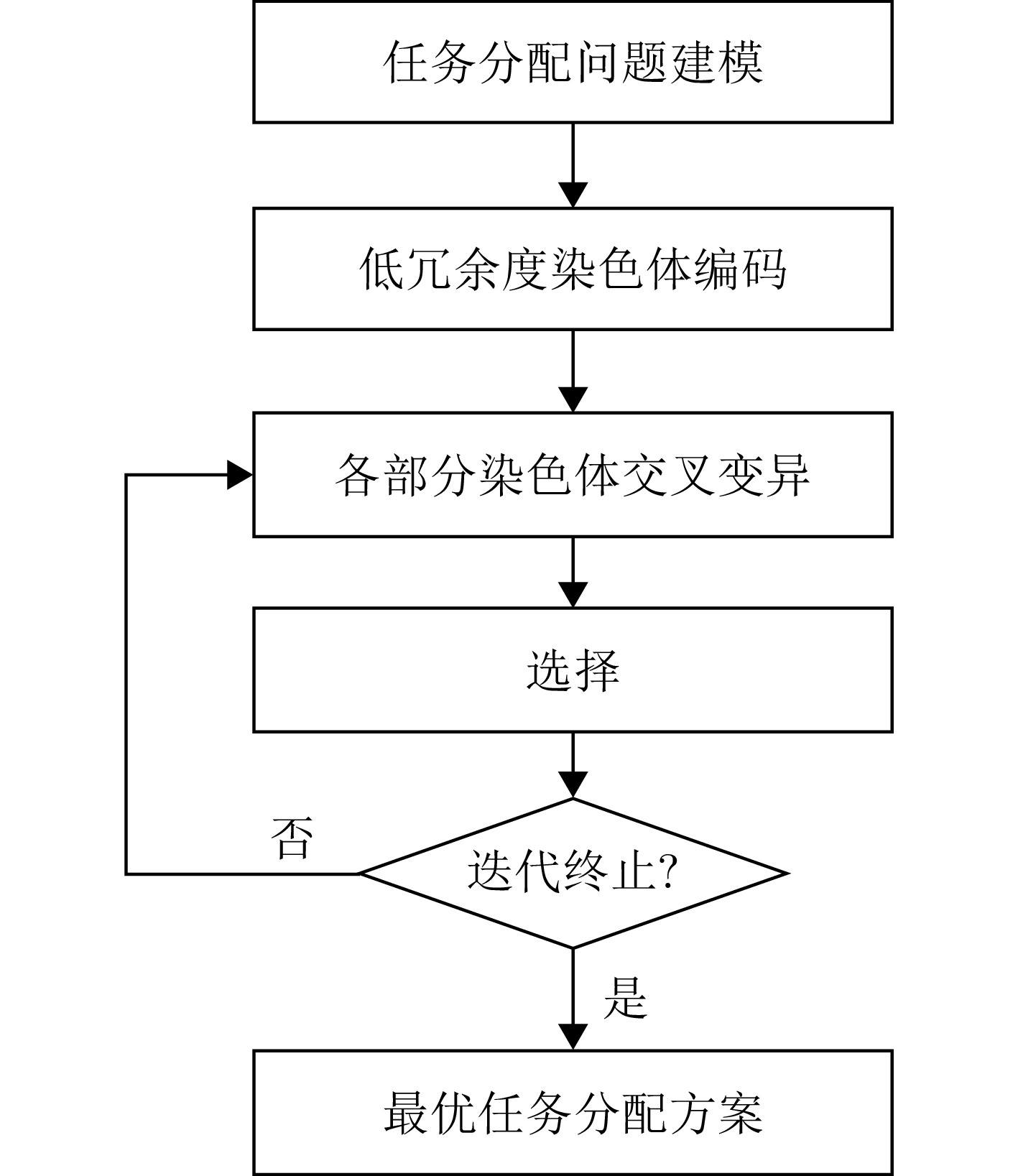
- Figure 9. Flowchart of low redundancy chromosome encoding algorithm
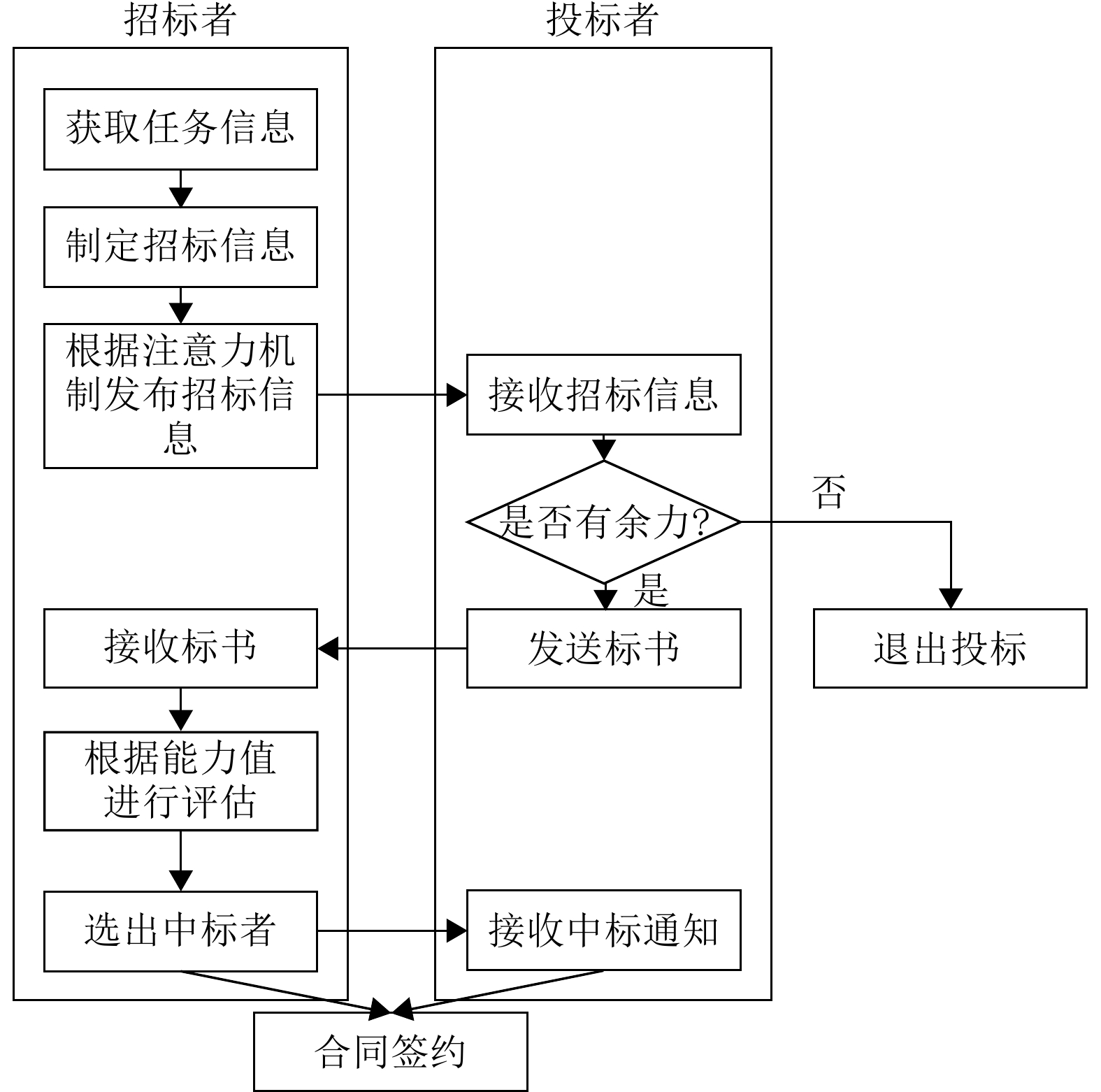
- Figure 10. Contract network algorithm incorporating attention mechanism
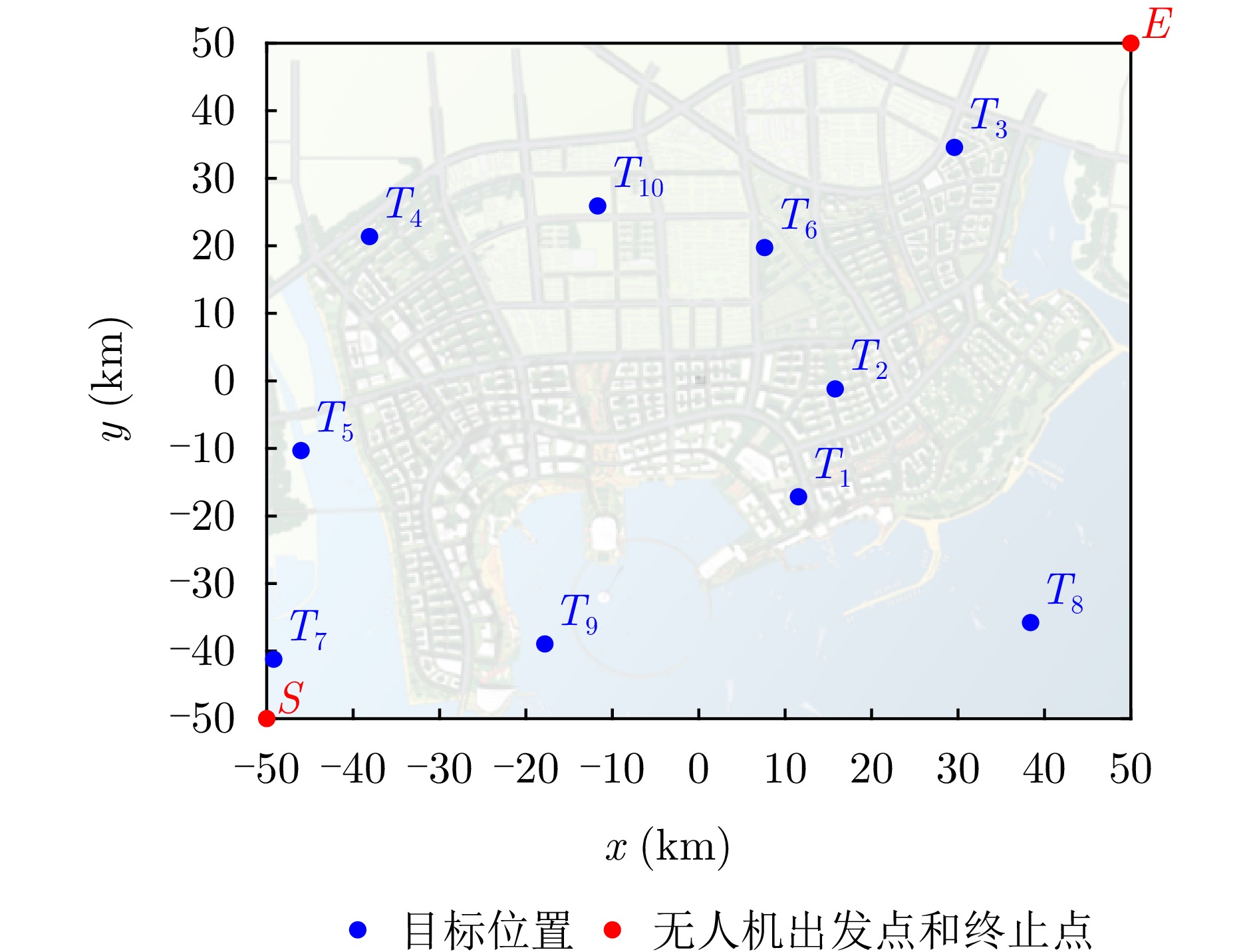
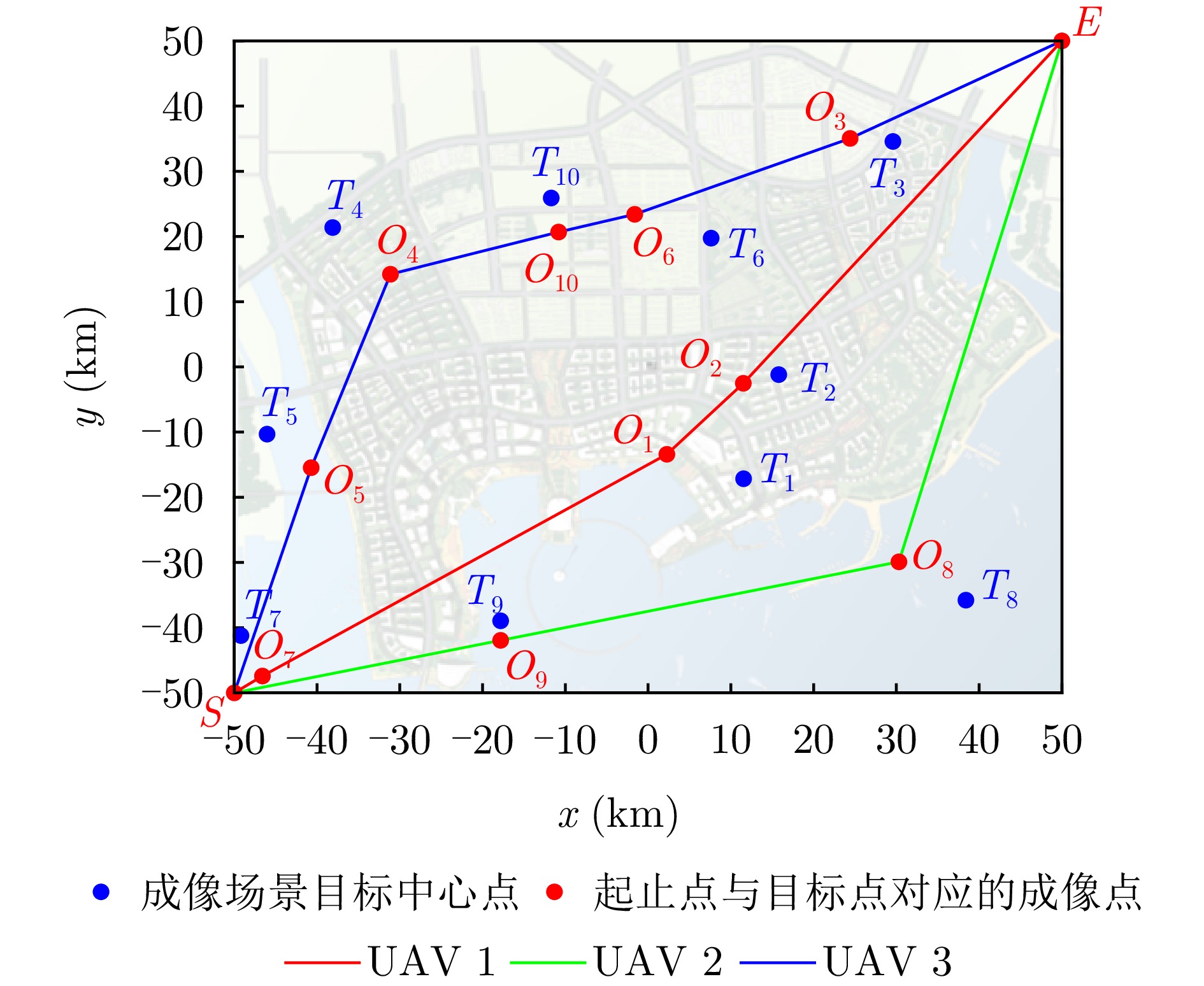
- Figure 11. Target distribution
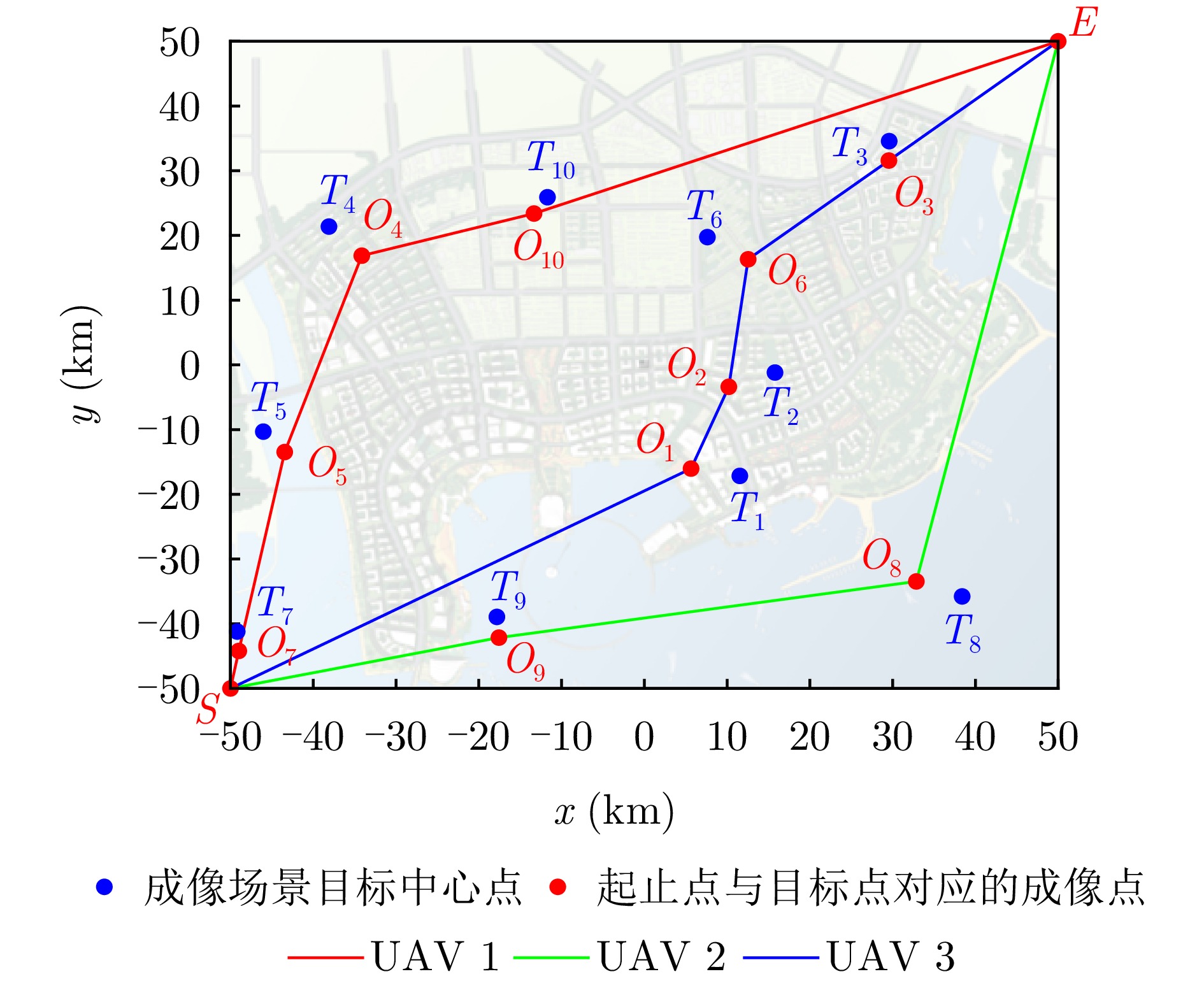
- Figure 12. Task allocation results
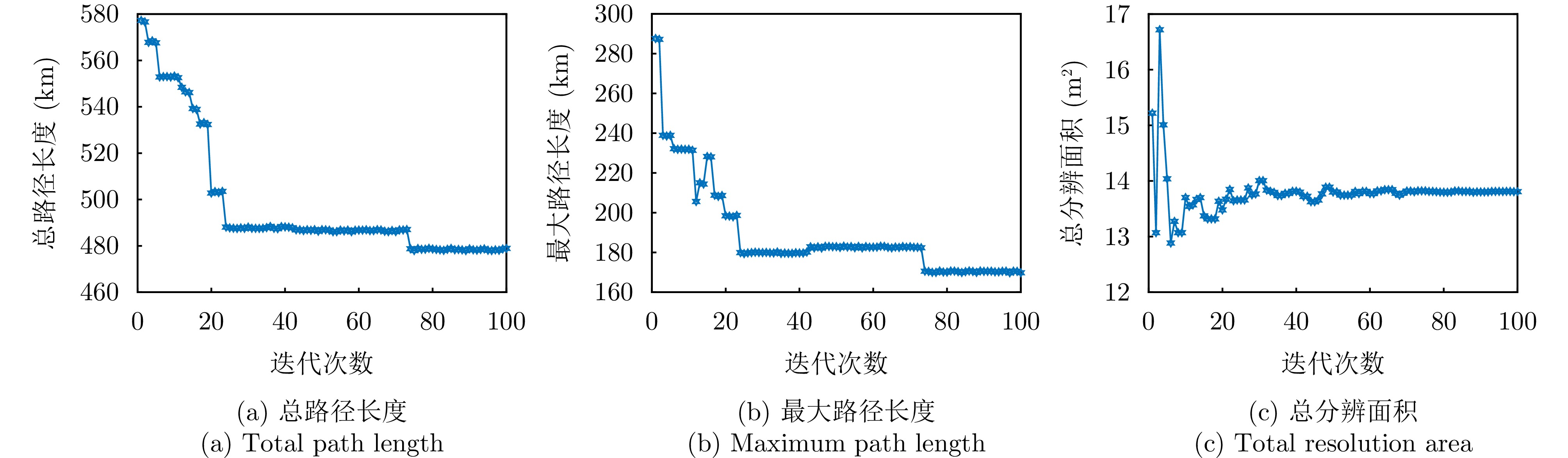
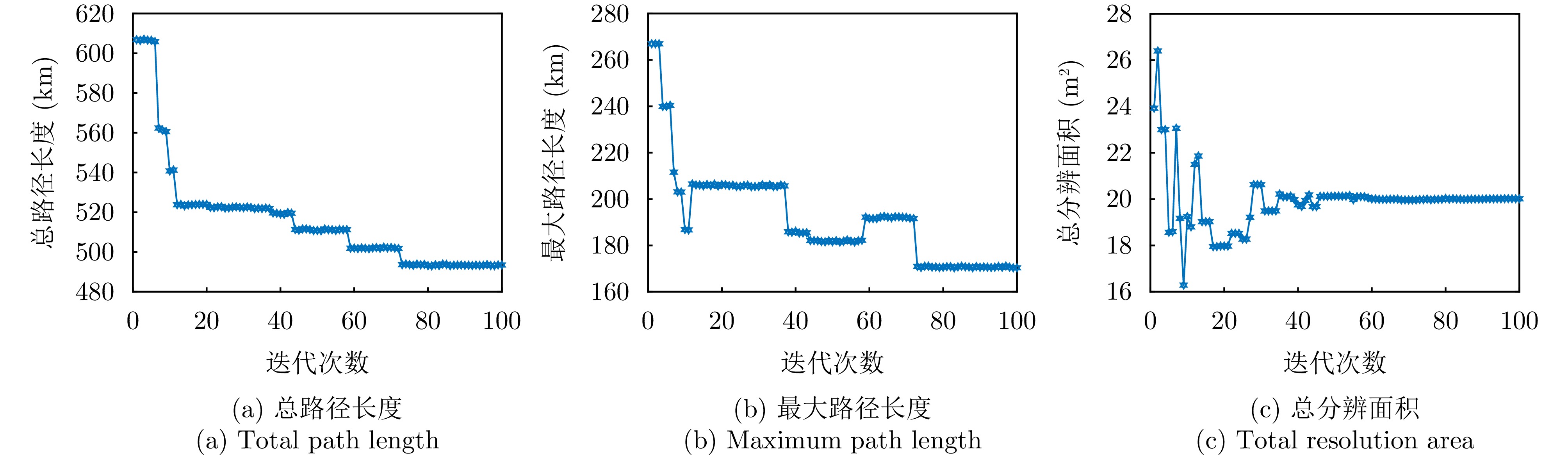
- Figure 13. The curves of the performance indicators of the proposed method changing with the number of iterations
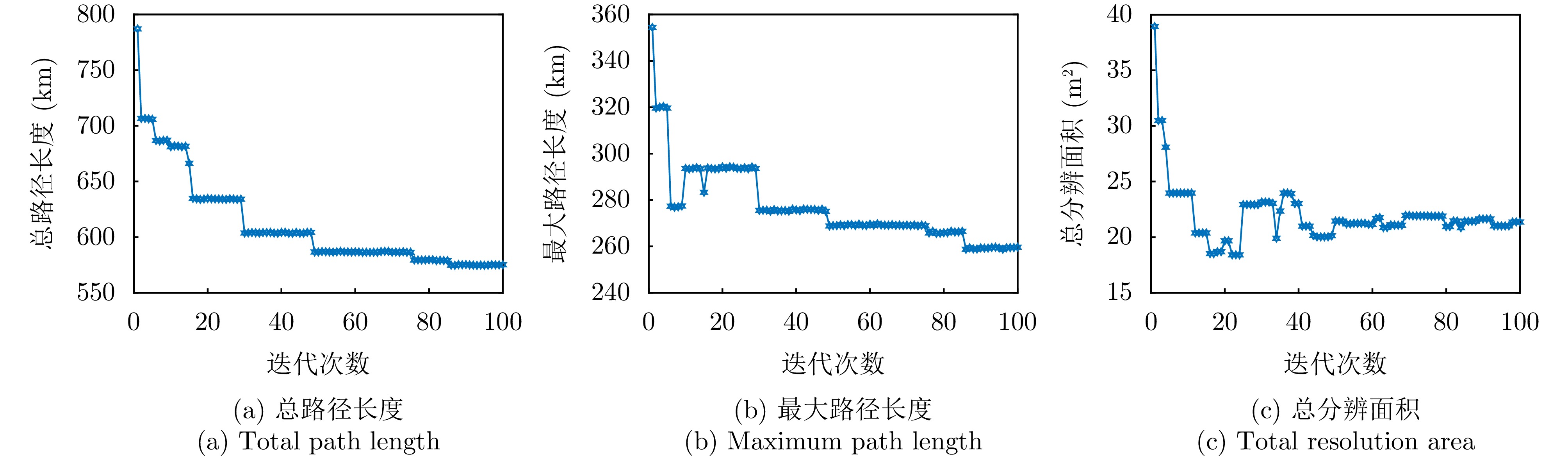
- Figure 14. The curves of the performance indicators of the single chromosome coding method changing with the number of iterations
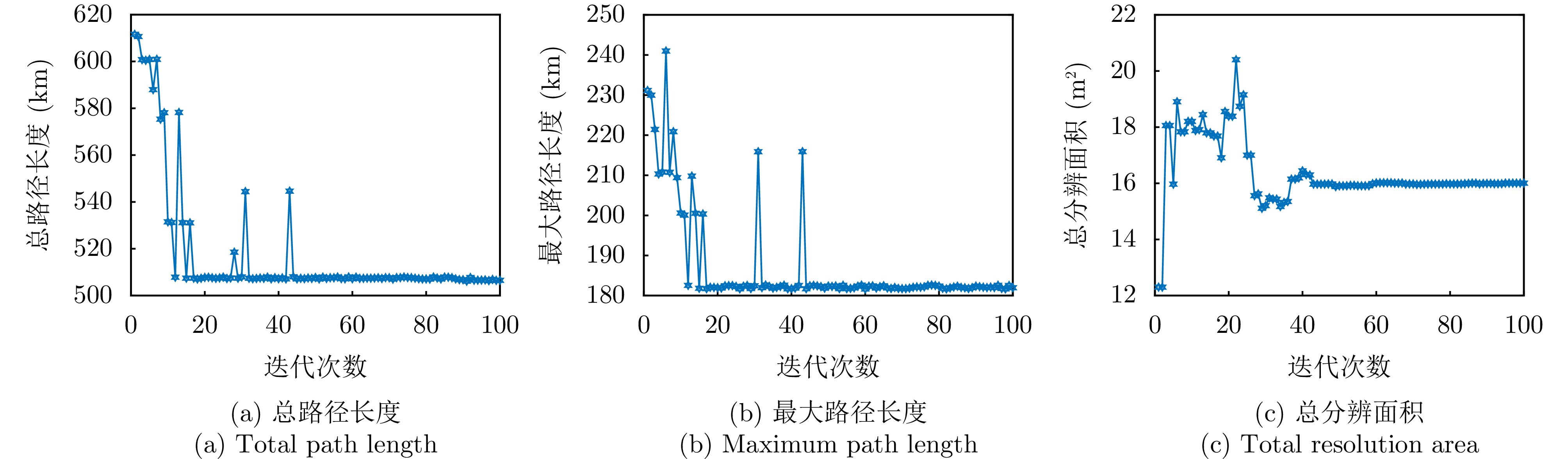
- Figure 15. The curves of the performance indicators of the dual chromosome coding method changing with the number of iterations
- Figure 16. The curves of the performance indicators of the particle swarm optimization algorithm changing with the number of iterations
- Figure 17. The curves of the performance indicators of simulated annealing algorithm changing with the number of iterations
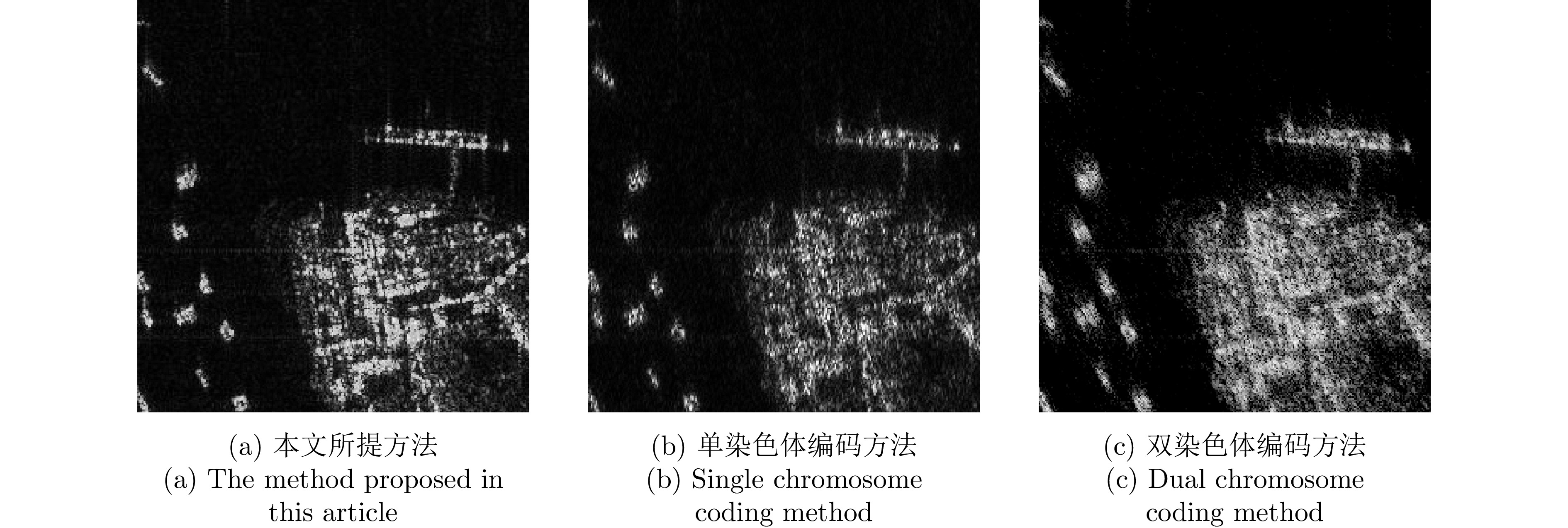
- Figure 18. The imaging results of target point T2
- Figure 19. The imaging results of target point T4
- Figure 20. The imaging results of target point T8
- Figure 21. Task allocation results under different imaging task requirements
- Figure 22. Dynamic task allocation scheme