
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese

| Citation: | GUO Wenjie, WU Zhenhua, CAO Yice, et al. Multidomain characteristic-guided multimodal contrastive recognition method for active radar jamming[J]. Journal of Radars, 2024, 13(5): 1004–1018. doi: 10.12000/JR24129

|
Multidomain Characteristic-guided Multimodal Contrastive Recognition Method for Active Radar Jamming
DOI: 10.12000/JR24129 CSTR: 32380.14.JR24129
More Information-
Abstract
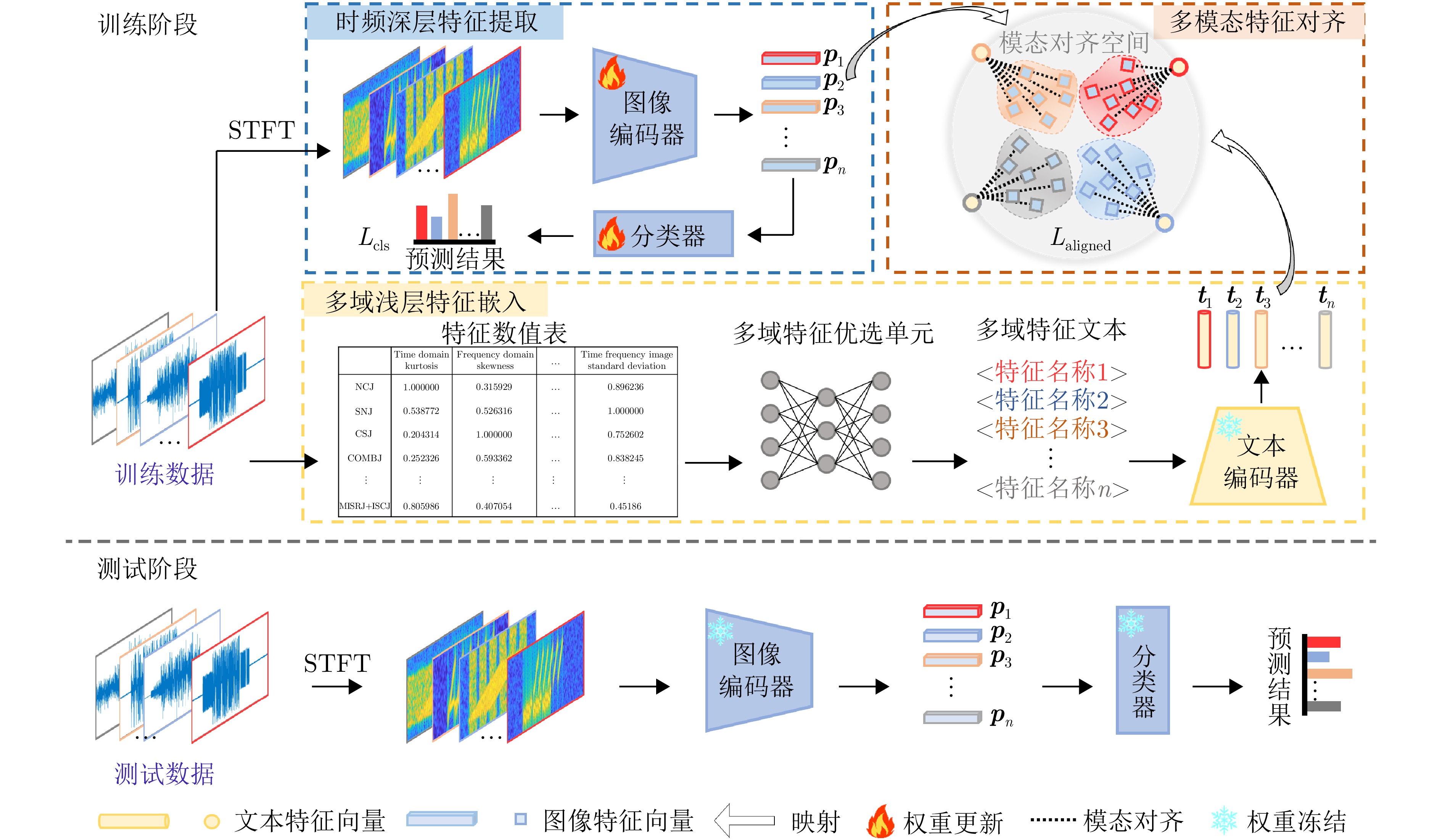
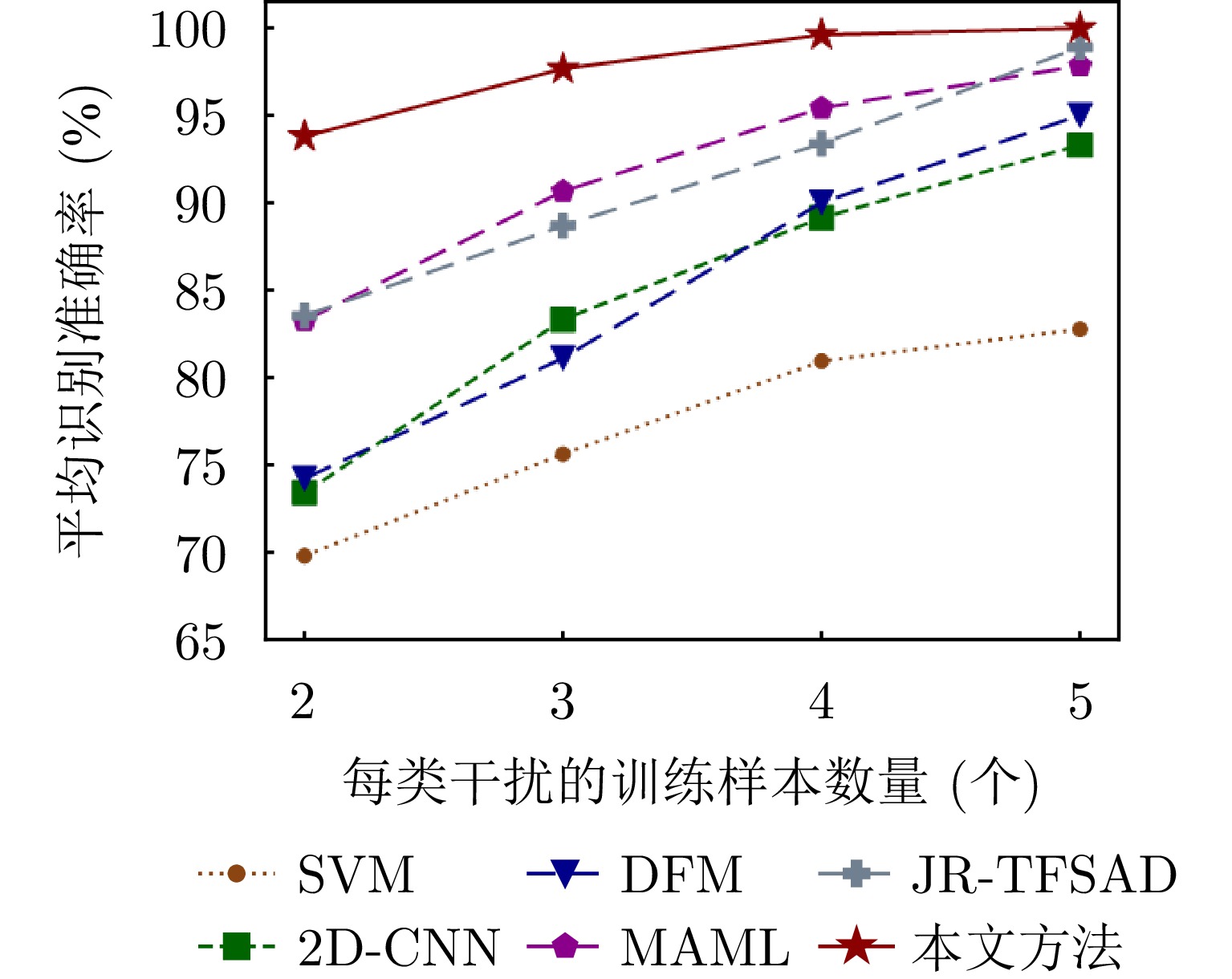
Achieving robust joint utilization of multidomain characteristics and deep-network features while maintaining a high jamming-recognition accuracy with limited samples is challenging. To address this issue, this paper proposes a multidomain characteristic-guided multimodal contrastive recognition method for active radar jamming. This method involves first thoroughly extracting the multidomain characteristics of active jamming and then designing an optimization unit to automatically select effective characteristics and generate a text modality imbued with implicit expert knowledge. The text modality and involved time-frequency transformation image are separately fed into text and image encoders to construct multimodal-feature pairs and map them to a high-dimensional space for modal alignment. The text features are used as anchors and a guide to time-frequency image features for aggregation around the anchors through contrastive learning, optimizing the image encoder’s representation capability, achieving tight intraclass and separated interclass distributions of active jamming. Experiments show that compared to existing methods, which involve directly combining multidomain characteristics and deep-network features, the proposed guided-joint method can achieve differential feature processing, thereby enhancing the discriminative and generalization capabilities of recognition features. Moreover, under extremely small-sample conditions (2~3 training samples for each type of jamming), the accuracy of our method is 9.84% higher than those of comparative methods, proving the effectiveness and robustness of the proposed method. -

-
References
[1] 崔国龙, 余显祥, 魏文强, 等. 认知智能雷达抗干扰技术综述与展望[J]. 雷达学报, 2022, 11(6): 974–1002. doi: 10.12000/JR22191.CUI Guolong, YU Xianxiang, WEI Wenqiang, et al. An overview of antijamming methods and future works on cognitive intelligent radar[J]. Journal of Radars, 2022, 11(6): 974–1002. doi: 10.12000/JR22191.[2] 解烽, 刘环宇, 胡锡坤, 等. 基于复数域深度强化学习的多干扰场景雷达抗干扰方法[J]. 雷达学报, 2023, 12(6): 1290–1304. doi: 10.12000/JR23139.XIE Feng, LIU Huanyu, HU Xikun, et al. A radar anti-jamming method under multi-jamming scenarios based on deep reinforcement learning in complex domains[J]. Journal of Radars, 2023, 12(6): 1290–1304. doi: 10.12000/JR23139.[3] 周红平, 王子伟, 郭忠义. 雷达有源干扰识别算法综述[J]. 数据采集与处理, 2022, 37(1): 1–20. doi: 10.16337/j.1004-9037.2022.01.001.ZHOU Hongping, WANG Ziwei, and GUO Zhongyi. Overview on recognition algorithms of radar active jamming[J]. Journal of Data Acquisition and Processing, 2022, 37(1): 1–20. doi: 10.16337/j.1004-9037.2022.01.001.[4] LV Qinzhe, FAN Hanxin, LIU Junliang, et al. Multilabel deep learning-based lightweight radar compound jamming recognition method[J]. IEEE Transactions on Instrumentation and Measurement, 2024, 73: 2521115. doi: 10.1109/TIM.2024.3400337.[5] CAO Ru, CAO Jiuwen, MEI Jianping, et al. Radar emitter identification with bispectrum and hierarchical extreme learning machine[J]. Multimedia Tools and Applications, 2019, 78(20): 28953–28970. doi: 10.1007/s11042-018-6134-y.[6] QU Qizhe, WANG Yongliang, LIU Weijian, et al. IRNet: Interference recognition networks for automotive radars via autocorrelation features[J]. IEEE Transactions on Microwave Theory and Techniques, 2022, 70(5): 2762–2774. doi: 10.1109/TMTT.2022.3151635.[7] WU Zhenhua, QIAN Jun, ZHANG Man, et al. High-confidence sample augmentation based on label-guided denoising diffusion probabilistic model for active deception jamming recognition[J]. IEEE Geoscience and Remote Sensing Letters, 2023, 20: 3508305. doi: 10.1109/LGRS.2023.3316282.[8] ZOU Wenxu, XIE Kai, and LIN Jinjian. Light-weight deep learning method for active jamming recognition based on improved MobileViT[J]. IET Radar, Sonar & Navigation, 2023, 17(8): 1299–1311. doi: 10.1049/rsn2.12420.[9] LV Qinzhe, QUAN Yinghui, FENG Wei, et al. Radar deception jamming recognition based on weighted ensemble CNN with transfer learning[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5107511. doi: 10.1109/TGRS.2021.3129645.[10] LUO Zhenyu, CAO Yunhe, YEO T S, et al. Few-shot radar jamming recognition network via time-frequency self-attention and global knowledge distillation[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 5105612. doi: 10.1109/TGRS.2023.3280322.[11] KONG Yukai, XIA Senlin, DONG Luxin, et al. Compound jamming recognition via contrastive learning for distributed MIMO radars[J]. IEEE Transactions on Vehicular Technology, 2024, 73(6): 7892–7907. doi: 10.1109/TVT.2024.3358996.[12] KONG Yukai, WANG Xiang, WU Changxin, et al. Active deception jamming recognition in the presence of extended target[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 4024905. doi: 10.1109/LGRS.2022.3184997.[13] ZHOU Hongping, WANG Lei, and GUO Zhongyi. Recognition of radar compound jamming based on convolutional neural network[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(6): 7380–7394. doi: 10.1109/TAES.2023.3288080.[14] PENG Ruihui, WEI Wenbin, SUN Dianxing, et al. Dense false target jamming recognition based on fast-slow time domain joint frequency response features[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(6): 9142–9159. doi: 10.1109/TAES.2023.3316125.[15] 魏赓力, 李凉海, 闫海鹏, 等. 基于多模特征融合的雷达干扰信号识别[J]. 遥测遥控, 2023, 44(4): 80–87. doi: 10.12347/j.ycyk.20230328001.WEI Gengli, LI Lianghai, YAN Haipeng, et al. Radar jamming signal identification based on multimode feature fusion[J]. Journal of Telemetry, Tracking and Command, 2023, 44(4): 80–87. doi: 10.12347/j.ycyk.20230328001.[16] 张顺生, 陈爽, 陈晓莹, 等. 面向小样本的多模态雷达有源欺骗干扰识别方法[J]. 雷达学报, 2023, 12(4): 882–891. doi: 10.12000/JR23104.ZHANG Shunsheng, CHEN Shuang, CHEN Xiaoying, et al. Active deception jamming recognition method in multimodal radar based on small samples[J]. Journal of Radars, 2023, 12(4): 882–891. doi: 10.12000/JR23104.[17] SHAO Guangqing, CHEN Yushi, and WEI Yinsheng. Deep fusion for radar jamming signal classification based on CNN[J]. IEEE Access, 2020, 8: 117236–117244. doi: 10.1109/ACCESS.2020.3004188.[18] ZHANG Yipeng, LU Dongdong, QIU Xiaolan, et al. Scattering-point topology for few-shot ship classification in SAR images[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2023, 16: 10326–10343. doi: 10.1109/JSTARS.2023.3328066.[19] GENG Jie, ZHANG Yuhang, and JIANG Wen. Polarimetric SAR image classification based on hierarchical scattering-spatial interaction transformer[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: 5205014. doi: 10.1109/TGRS.2024.3362360.[20] 郭帅, 陈婷, 王鹏辉, 等. 基于角度引导Transformer融合网络的多站协同目标识别方法[J]. 雷达学报, 2023, 12(3): 516–528. doi: 10.12000/JR23014.GUO Shuai, CHEN Ting, WANG Penghui, et al. Multistation cooperative radar target recognition based on an angle-guided Transformer fusion network[J]. Journal of Radars, 2023, 12(3): 516–528. doi: 10.12000/JR23014.[21] CHEN Xiaolong, SU Ningyuan, HUANG Yong, et al. False-alarm-controllable radar detection for marine target based on multi features fusion via CNNs[J]. IEEE Sensors Journal, 2021, 21(7): 9099–9111. doi: 10.1109/JSEN.2021.3054744.[22] RADFORD A, KIM J W, HALLACY C, et al. Learning transferable visual models from natural language supervision[C]. The 38th International Conference on Machine Learning (ICML), 2021: 8748–8763.[23] 李宏, 郑光勇, 郭雷, 等. 雷达相参压制干扰信号分析[J]. 电子信息对抗技术, 2013, 28(3): 36–40. doi: 10.3969/j.issn.1674-2230.2013.03.009.LI Hong, ZHENG Guangyong, GUO Lei, et al. Jamming analysis of radar coherent suppressing[J]. Electronic Information Warfare Technology, 2013, 28(3): 36–40. doi: 10.3969/j.issn.1674-2230.2013.03.009.[24] WEI Shaopeng, ZHANG Lei, LU Jingyue, et al. Modulated-ISRJ rejection using online dictionary learning for synthetic aperture radar imagery[J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 316–329. doi: 10.23919/JSEE.2023.000076.[25] TAN Mingxing and LE Q V. EfficientNetV2: Smaller models and faster training[C]. The 38th International Conference on Machine Learning (ICML), 2021: 10096–10106.[26] GONG Heng, FENG Xiaocheng, QIN Bing, et al. Table-to-text generation with effective hierarchical encoder on three dimensions (row, column and time)[C]. The 2019 Conference on Empirical Methods in Natural Language Processing and the 9th International Joint Conference on Natural Language Processing, Hong Kong, China, 2019: 3143–3152. doi: 10.18653/v1/D19-1310.[27] LI Liang, MA Can, YUE Yinliang, et al. Improving encoder by auxiliary supervision tasks for table-to-text generation[C]. The 59th Annual Meeting of the Association for Computational Linguistics and the 11th International Joint Conference on Natural Language Processing (Volume 1: Long Papers), 2021: 5979–5989. doi: 10.18653/v1/2021.acl-long.466.[28] RADFORD A, WU J, CHILD R, et al. Language models are unsupervised multitask learners[J]. OpenAI Blog, 2019, 1(8): 9.[29] KHOSLA P, TETERWAK P, WANG Chen, et al. Supervised contrastive learning[C]. The 34th International Conference on Neural Information Processing Systems (NIPS’20), Vancouver, Canada, 2020: 1567.[30] WANG Feng and LIU Huaping. Understanding the behaviour of contrastive loss[C]. IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, USA, 2021: 2495–2504. doi: 10.1109/CVPR46437.2021.00252.[31] LIU Mingqian, LIU Zilong, LU Weidang, et al. Distributed few-shot learning for intelligent recognition of communication jamming[J]. IEEE Journal of Selected Topics in Signal Processing, 2022, 16(3): 395–405. doi: 10.1109/JSTSP.2021.3137028. -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:
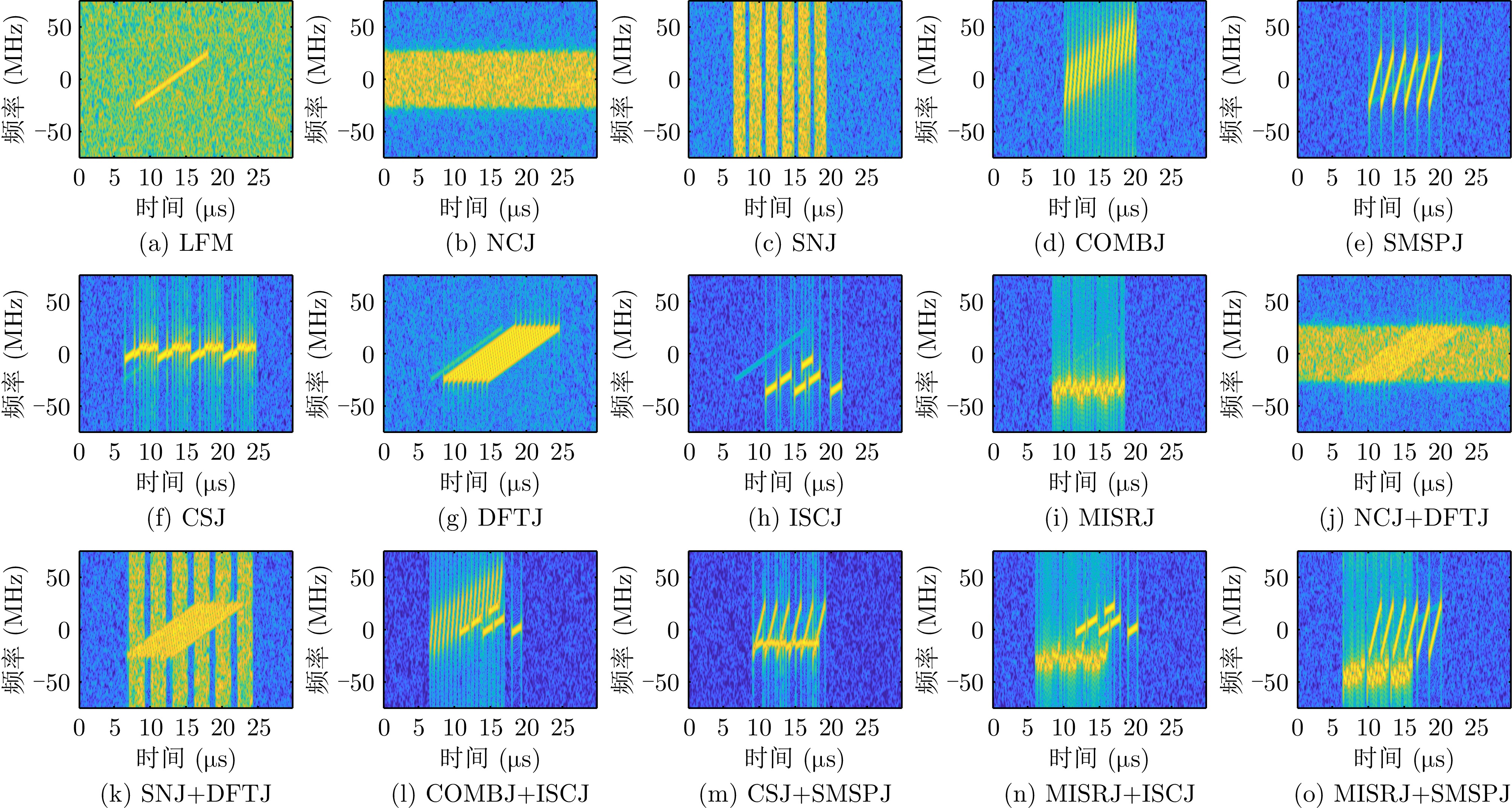
- Figure 1. Time-frequency spectrograms of the transmission signal and radar jamming
- Figure 2. Algorithm flowchart of the proposed method
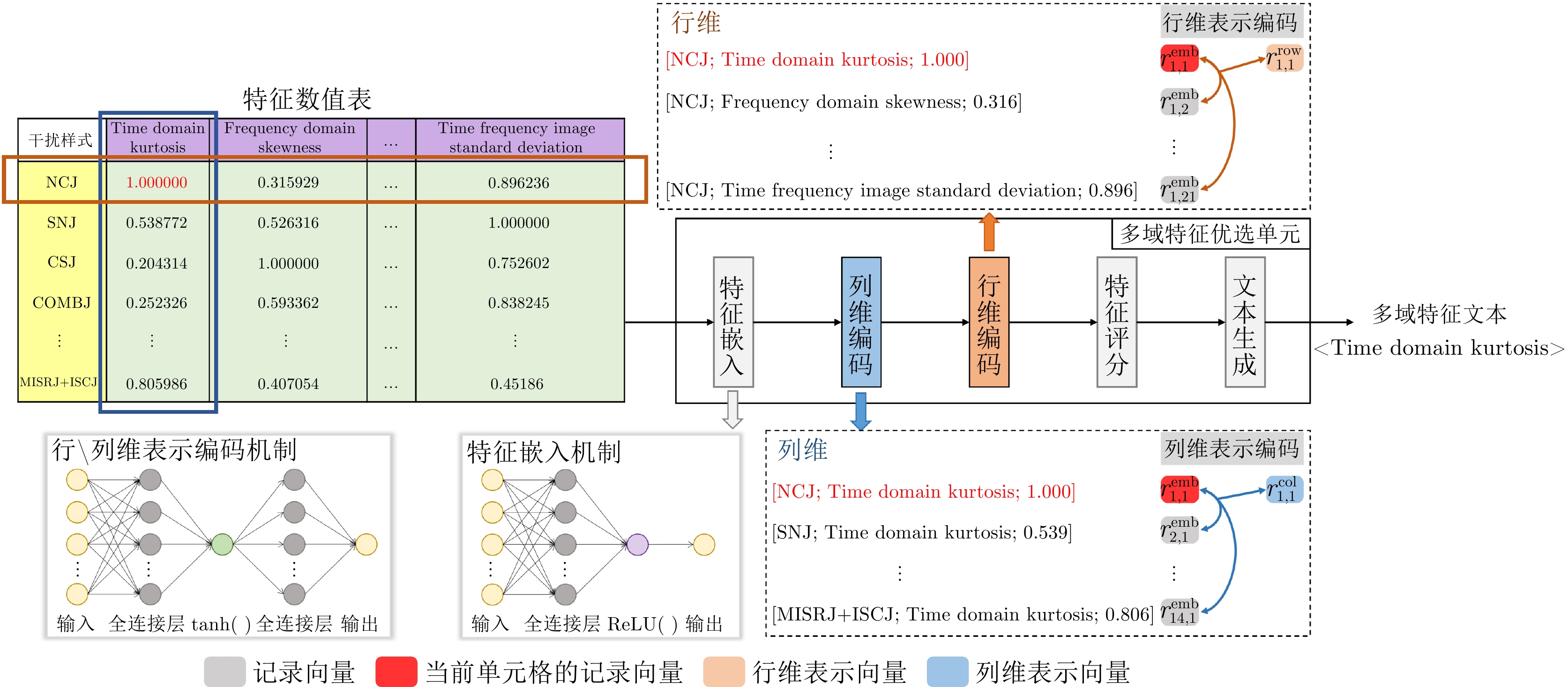
- Figure 3. Algorithm flowchart of the multidomain characteristics selection unit (taking NCJ as an example)
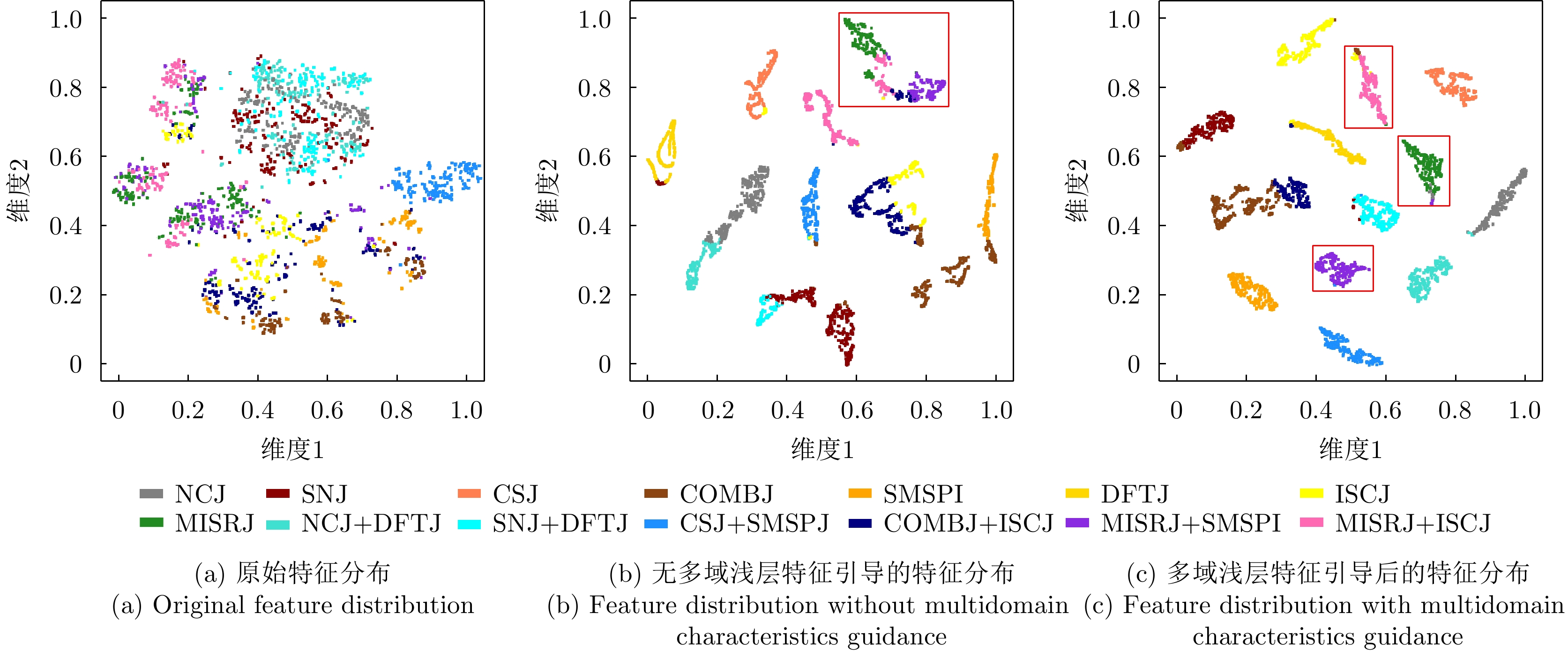
- Figure 4. Visualization of time-frequency images deep features
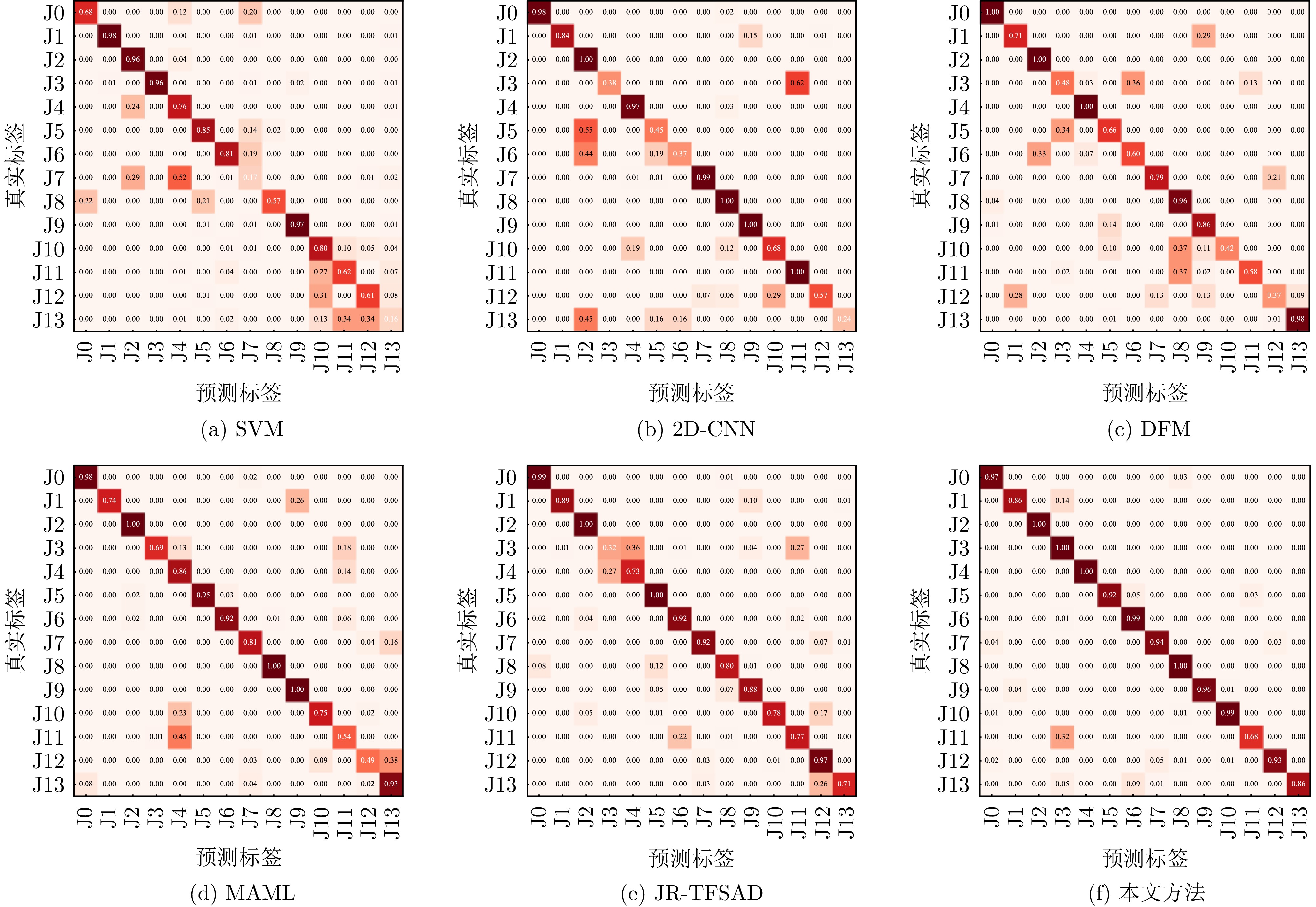
- Figure 5. Confusion matrix experimental results between the proposed method and the comparative methods
- Figure 6. Recognition accuracy line chart of different methods under different numbers of training samples