
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese
| Citation: | HUANG Pingping, REN Huifang, TAN Weixian, et al. Unsupervised change detection using ground-based radar image[J]. Journal of Radars, 2020, 9(3): 514–524. doi: 10.12000/JR20004

|
Unsupervised Change Detection Using Ground-based Radar Image
DOI: 10.12000/JR20004 CSTR: 32380.14.JR20004
More Information-
Abstract
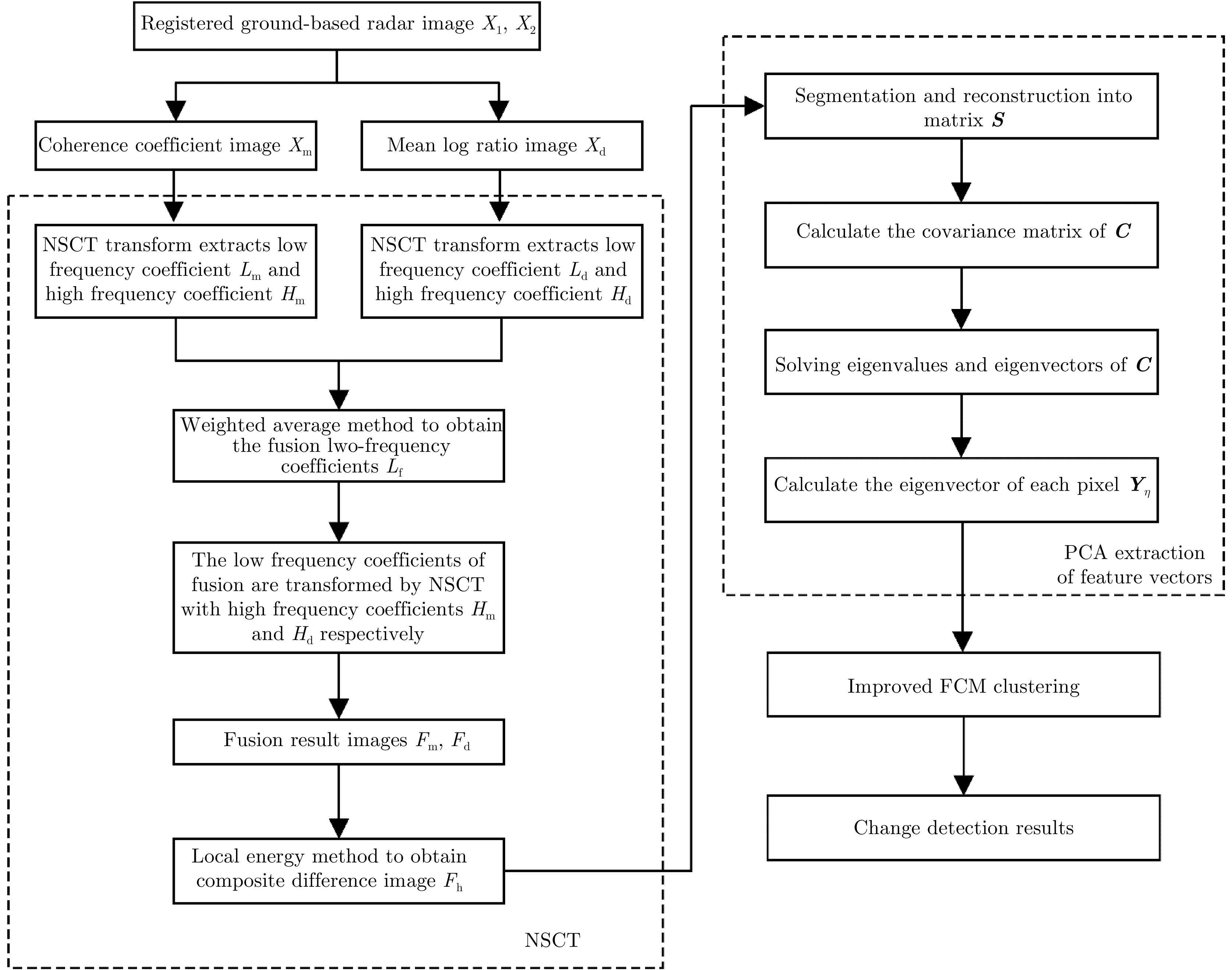
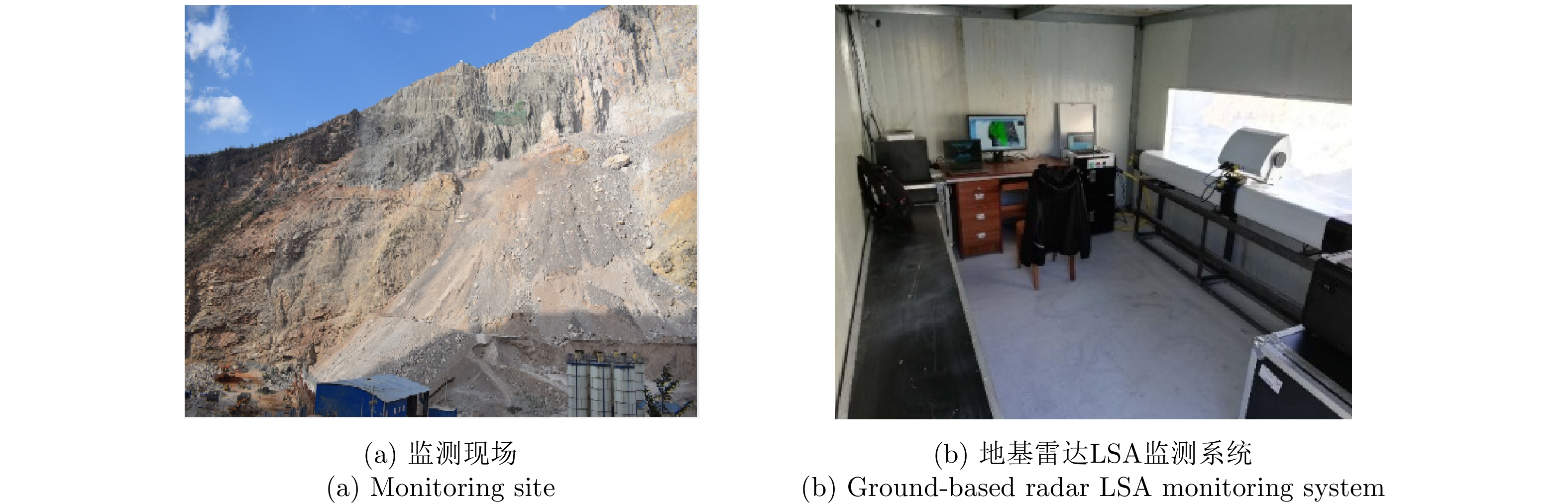
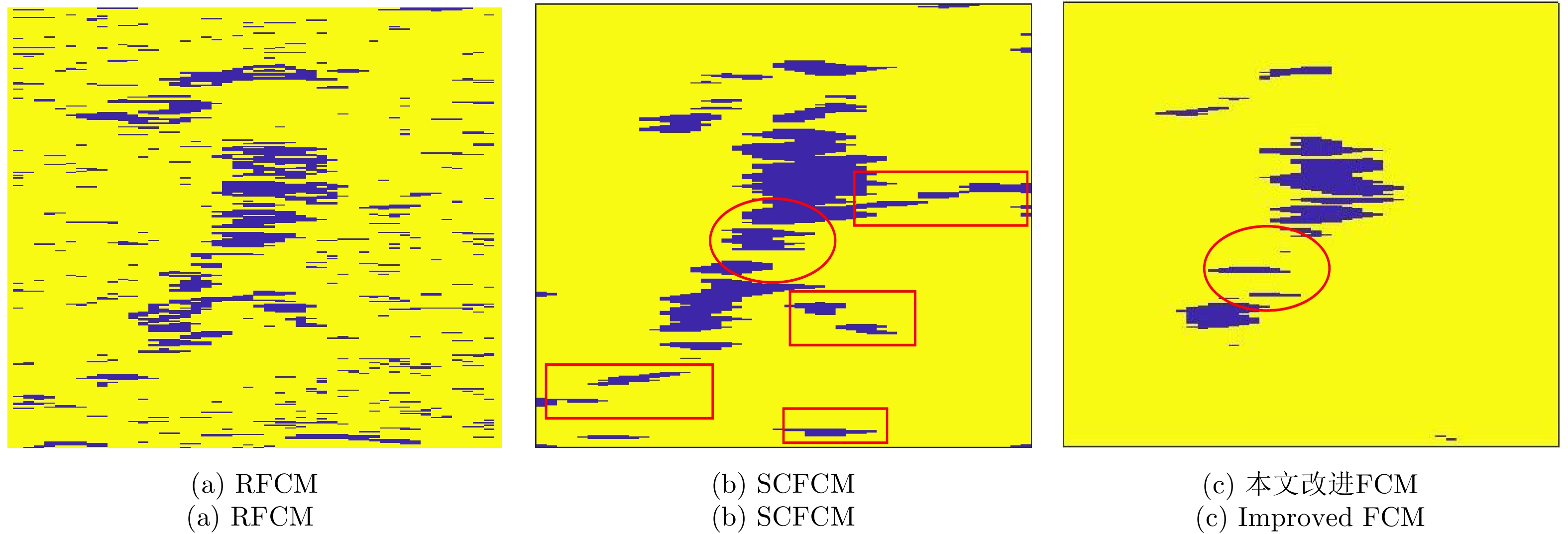
Ground-based radar is a microwave remote sensing imaging technology that has been gradually developed throughout the past 20 years so that it has become mature. At present, it has been widely used in monitoring geological disasters such as landslides and collapses. Ground-based radars can detect micro-variations in target areas through the principle of interferometry. However, due to human factors, geological factors, and meteorological factors, the radar image of the monitored area is incoherent, which makes long-term quantitative monitoring difficult. Therefore, further developing the application of change detection while considering quantitative monitoring is urgent, to provide effective information on long-term changes and comprehensively understand the dynamic changes in the monitored area. To solve the above problems, an unsupervised change detection method using ground-based radar images and based on an improved Fuzzy C-Means clustering (FCM) algorithm is proposed in this paper. In this method, for the first time, the Nonsubsampled Contourlet Transform (NSCT) is performed on the coherence coefficient map and the mean log ratio map to obtain the fusion difference map. Then, principal component analysis is used to extract the feature vectors of each pixel in the fusion difference image. The FCM is improved according to the characteristics of the ground-based radar images. The improved FCM is used to cluster the feature vectors of each pixel to obtain the change detection result. A ground-based radar LSA was used to monitor the treatment process of a dam in southwest China. During the monitoring process, landslides occurred in the monitored area affected by precipitation and other factors. This method is used to detect the change of the radar image before and after the landslide. The results show that the proposed method allows for easier clustering and segmenting, and the change detection results can significantly reduce the noise points while retaining the change area. -

-
References
[1] WANG Yan, DU Lan, and DAI Hui. Unsupervised SAR image change detection based on SIFT keypoints and region information[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(7): 931–935. doi: 10.1109/LGRS.2016.2554606[2] GONG Maoguo, SU Linzhi, JIA Meng, et al. Fuzzy clustering with a modified MRF energy function for change detection in synthetic aperture radar images[J]. IEEE Transactions on Fuzzy Systems, 2014, 22(1): 98–109. doi: 10.1109/TFUZZ.2013.2249072[3] GAO Feng, DONG Junyu, LI Bo, et al. Automatic change detection in synthetic aperture radar images based on PCANet[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(12): 1792–1796. doi: 10.1109/LGRS.2016.2611001[4] GONG Maoguo, CAO Yu, and WU Qiaodi. A neighborhood-based ratio approach for change detection in SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2012, 9(2): 307–311. doi: 10.1109/LGRS.2011.2167211[5] GONG Maoguo, ZHOU Zhiqiang, and MA Jingjing. Change detection in synthetic aperture radar images based on image fusion and fuzzy clustering[J]. IEEE Transactions on Image Processing, 2012, 21(4): 2141–2151. doi: 10.1109/TIP.2011.2170702[6] SUMAIYA M N and KUMARI R S S. Logarithmic mean-based thresholding for SAR image change detection[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(11): 1726–1728. doi: 10.1109/LGRS.2016.2606119[7] 杨祥立, 徐德伟, 黄平平, 等. 融合相干/非相干信息的高分辨率SAR图像变化检测[J]. 雷达学报, 2015, 4(5): 582–590. doi: 10.12000/JR15073YANG Xiangli, XU Dewei, HUANG Pingping, et al. Change detection of high resolution SAR images by the fusion of coherent/incoherent information[J]. Journal of Radars, 2015, 4(5): 582–590. doi: 10.12000/JR15073[8] ELGUEBALY T and BOUGUILA N. A Bayesian approach for SAR images segmentation and changes detection[C]. The 25th Biennial Symposium on Communications, Kingston, Canada, 2010: 24–27. doi: 10.1109/BSC.2010.5473011.[9] 邵宁远, 邹焕新, 陈诚, 等. 面向变化检测的SAR图像超像素协同分割算法[J]. 系统工程与电子技术, 2019, 41(7): 1496–1503. doi: 10.3969/j.issn.1001-506X.2019.07.09SHAO Ningyuan, ZOU Huanxin, CHEN Cheng, et al. Change detection oriented superpixel cosegmentation algorithm for SAR images[J]. Systems Engineering and Electronics, 2019, 41(7): 1496–1503. doi: 10.3969/j.issn.1001-506X.2019.07.09[10] CARINCOTTE C, DERRODE S, and BOURENNANE S. Unsupervised change detection on SAR images using fuzzy hidden Markov chains[J]. IEEE Transactions on Geoscience and Remote Sensing, 2006, 44(2): 432–441. doi: 10.1109/TGRS.2005.861007[11] BEZDEK J C, EHRLICH R, and FULL W. FCM: The fuzzy c-means clustering algorithm[J]. Computers & Geosciences, 1984, 10(2/3): 191–203. doi: 10.1016/0098-3004(84)90020-7[12] PHAM D L. Spatial models for fuzzy clustering[J]. Computer Vision and Image Understanding, 2001, 84(2): 285–297. doi: 10.1006/cviu.2001.0951[13] TRAN T N, WEHRENS R, and BUYDENS L M C. Clustering multispectral images: A tutorial[J]. Chemometrics and Intelligent Laboratory Systems, 2005, 77(1/2): 3–17. doi: 10.1016/j.chemolab.2004.07.011[14] LI Zhenfang, BAO Zheng, LI Hai, et al. Image autocoregistration and InSAR interferogram estimation using joint subspace projection[J]. IEEE Transactions on Geoscience and Remote Sensing, 2006, 44(2): 288–297. doi: 10.1109/TGRS.2005.860984[15] HYDE P, DUBAYAH R, WALKER W, et al. Mapping forest structure for wildlife habitat analysis using multi-sensor (LiDAR, SAR/InSAR, ETM+, Quickbird) synergy[J]. Remote Sensing of Environment, 2006, 102(1/2): 63–73. doi: 10.1016/j.rse.2006.01.021[16] ADU J, GAN Jianhong, WANG Yan, et al. Image fusion based on nonsubsampled contourlet transform for infrared and visible light image[J]. Infrared Physics & Technology, 2013, 61: 94–100. doi: 10.1016/j.infrared.2013.07.010[17] WU Chao and WU Yiquan. Multitemporal images change detection using nonsubsampled contourlet transform and kernel fuzzy C-means clustering[C]. The 2nd International Symposium on Intelligence Information Processing and Trusted Computing, Wuhan, China, 2011: 22–23. doi: 10.1109/IPTC.2011.31.[18] 李青松, 覃锡忠, 贾振红, 等. 非下采样Contourlet域融合和参数化内核图割的SAR图像无监督水灾变化检测[J]. 中国图象图形学报, 2014, 19(6): 971–978. doi: 10.11834/jig.20140619LI Qingsong, QIN Xizhong, JIA Zhenhong, et al. Unsupervised detection of flood changes with SAR images combining nonsubsampled Contourlet domain fusion and parametric kernel graph cuts[J]. Journal of Image and Graphics, 2014, 19(6): 971–978. doi: 10.11834/jig.20140619[19] 刘陆洋, 贾振红, 杨杰, 等. 利用双差异图和PCA的SAR图像变化检测[J]. 计算机工程与设计, 2019, 40(7): 2002–2006.LIU Luyang, JIA Zhenhong, YANG Jie, et al. SAR image chang detective using double difference images and PCA algorithm[J]. Computer Engineering and Design, 2019, 40(7): 2002–2006.[20] 慕彩红, 霍利利, 刘逸, 等. 基于小波融合和PCA-核模糊聚类的遥感图像变化检测[J]. 电子学报, 2015, 43(7): 1375–1381. doi: 10.3969/j.issn.0372-2112.2015.07.019MU Caihong, HUO Lili, LIU Yi, et al. Change detection for remote sensing images based on wavelet fusion and PCA-Kernel fuzzy clustering[J]. Acta Electronica Sinica, 2015, 43(7): 1375–1381. doi: 10.3969/j.issn.0372-2112.2015.07.019[21] EL-DAWLATLY S, OSMAN H, and SHAHEIN H I. New spatial FCM approach with application to SAR target clustering[C]. The 8th International Conference on Signal Processing, Beijing, China, 2006. doi: 10.1109/ICOSP.2006.345896. -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:



- Figure 1. Flow chart for unsupervised change detection based on ground-based radar image
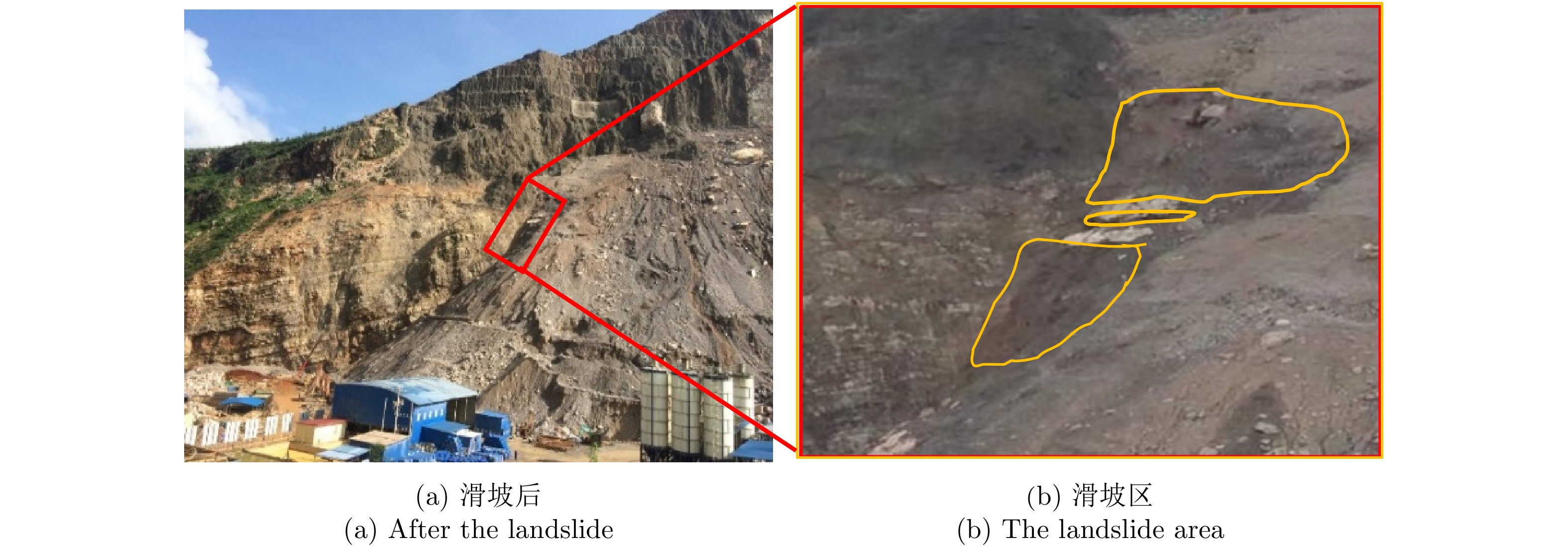
- Figure 2. Monitoring site images
- Figure 3. Experimental data
- Figure 4. Initial difference images
- Figure 5. Difference images comparison
- Figure 6. Clustering result comparison
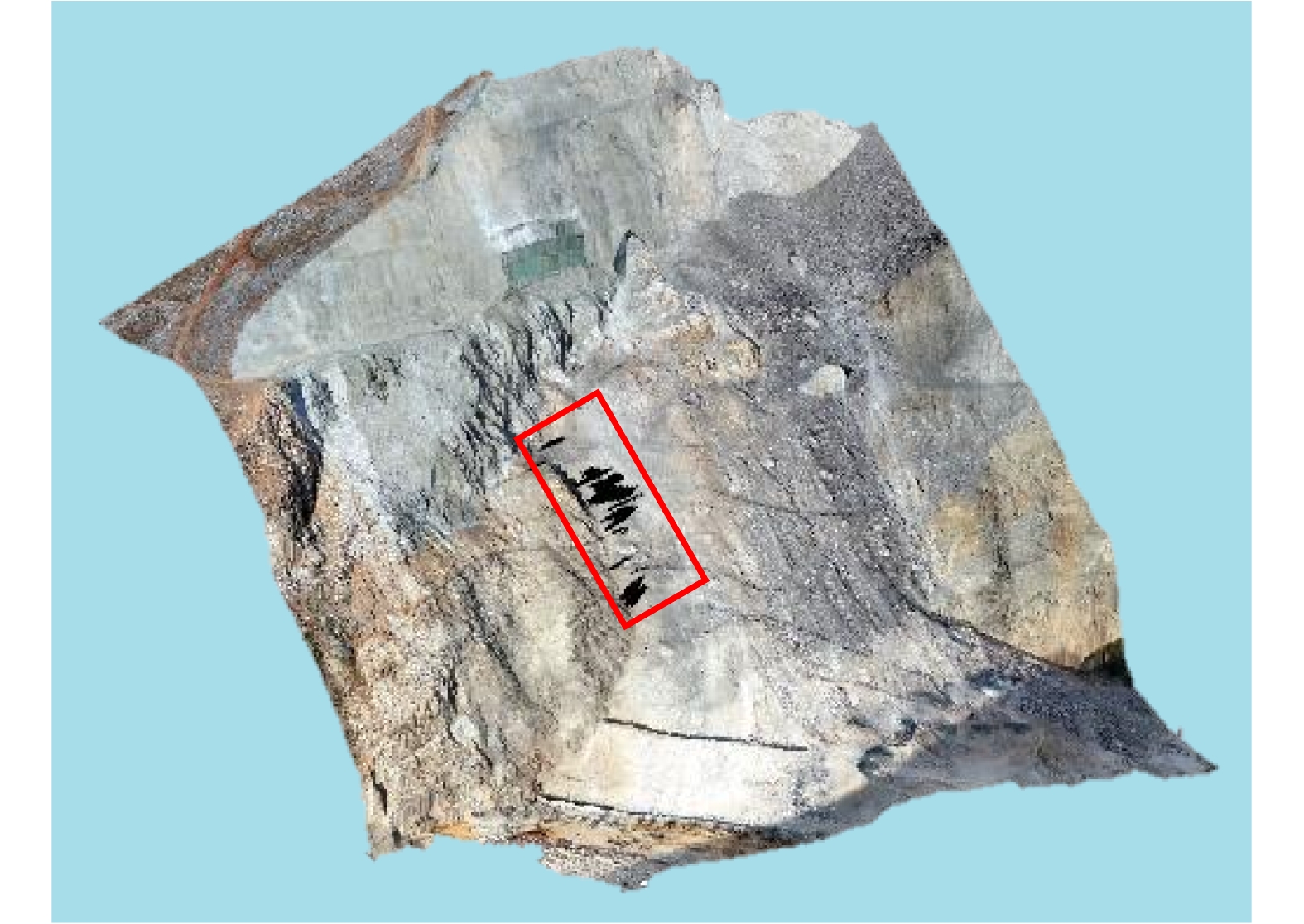
- Figure 7. Optical image of monitoring site
- Figure 8. Effect of fusion of change detection results and UAV tilt photography