
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
摘要: 针对雷达海上目标探测关键技术攻关对雷达实测数据的迫切需求,2019年提出了“雷达对海探测数据共享计划”。该计划旨在通过开展雷达试验获取数据,公开共享。2020年度该计划继续推进,开展了雷达目标RCS定标、不同海况海杂波与目标探测、海上机动目标检测跟踪3个方面的多次试验,获取了不同距离处不锈钢球定标体的雷达慢速扫描模式测量数据、不同方位下海杂波凝视模式测量数据、海上目标凝视模式探测数据、海上机动快艇雷达扫描模式测量数据,并同步获取了风和浪要素数据、目标AIS数据、可见光/红外数据等配合传感器数据。Abstract: There is an urgent need for radar-measured data to tackle key technologies of radar maritime target detection. The ‘‘Sea-detecting X-band Radar and Data Acquisition Program’’, proposed in 2019, aims to obtain data through radar experiments and share them publicly. In 2020, the program continued to advance and conducted several experiments in three aspects, namely, Radar Cross-Section (RCS) calibration of radar targets, detection of sea clutter and target under different sea conditions, as well as detection and tracking of maneuvering targets in sea. The measurement data of the stainless steel sphere calibrator at different distances in radar slow-scanning mode, sea clutter in radar staring mode in different directions, sea target in radar staring mode, and marine engine speedboat in radar scanning mode are obtained. In addition, wind and wave data, data from the Automatic Identification System (AIS) of targets, visible/infrared data, and other associated sensor data are synchronously obtained.
-
Key words:
- Radar /
- Sea-detecting experiment /
- Sea clutter /
- Target detection /
- Data sharing
-

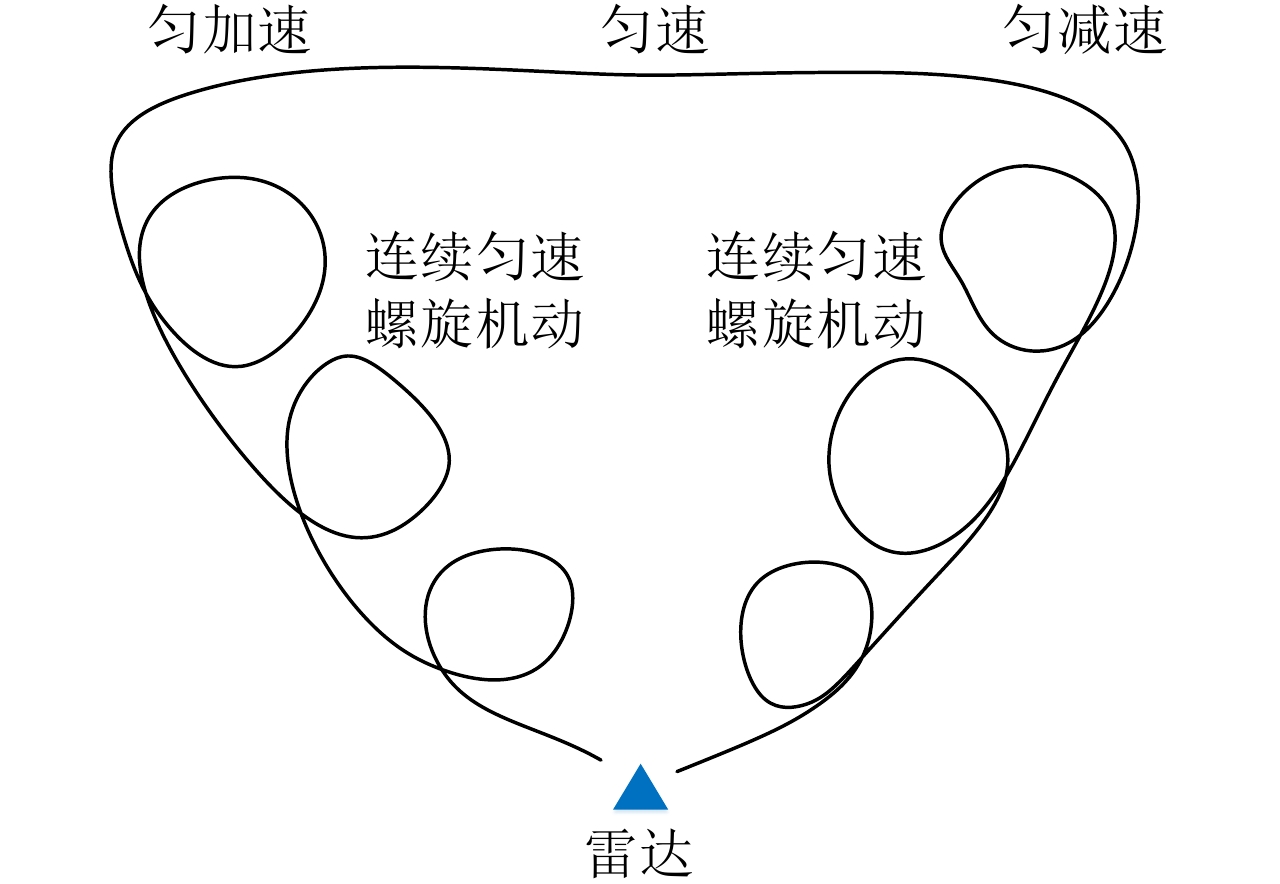
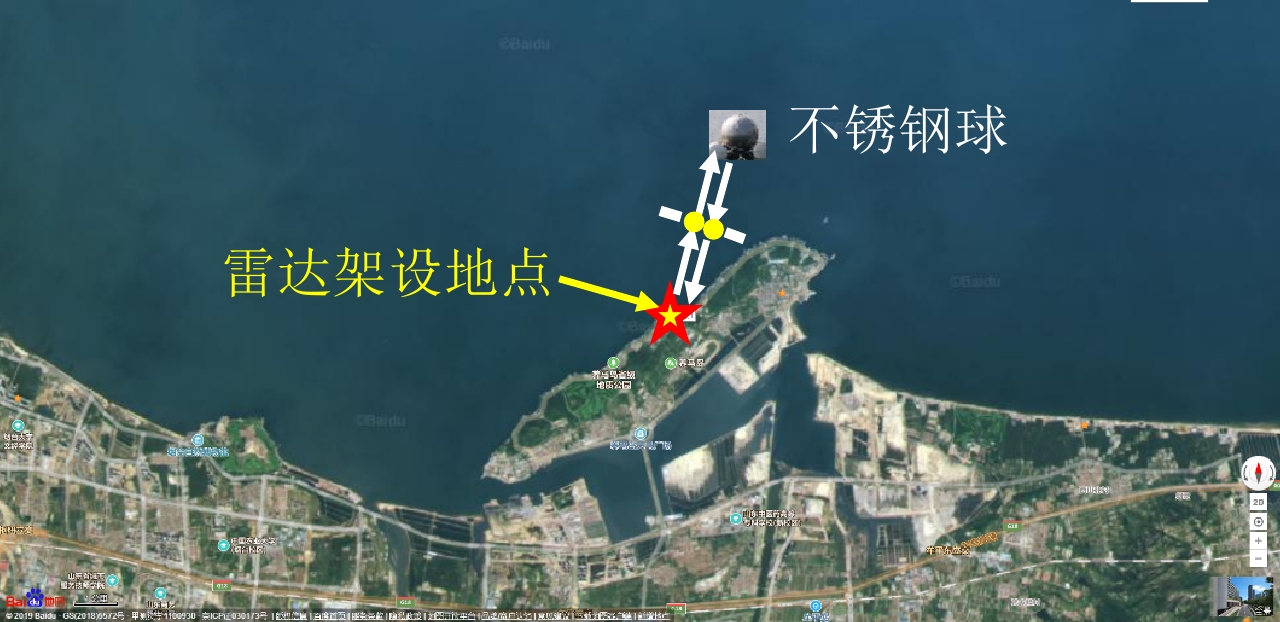
图 1 试验点及定标体运动轨迹示意图
Figure 1. Experimental site and schematic diagram of calibration body’s trajectory
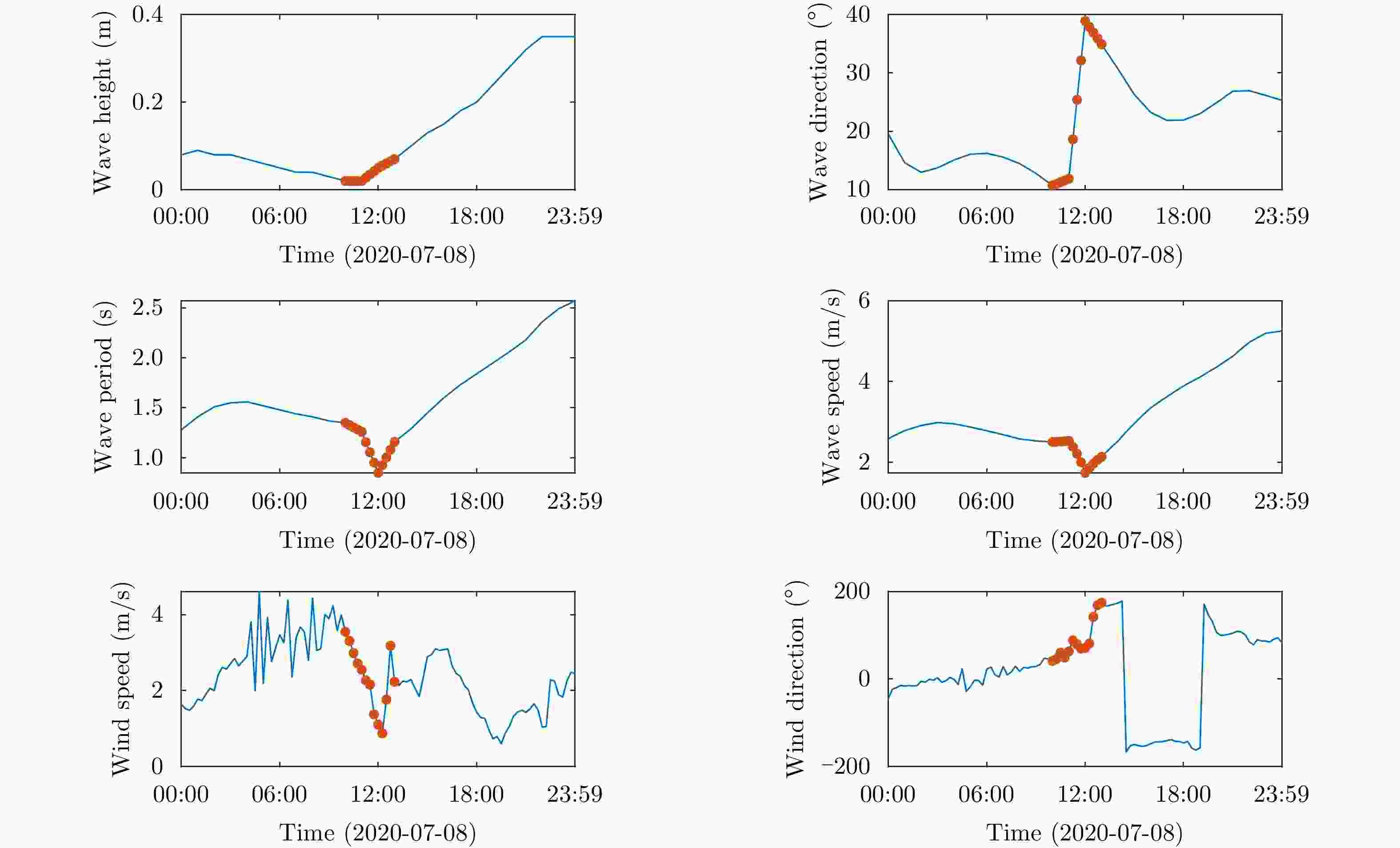
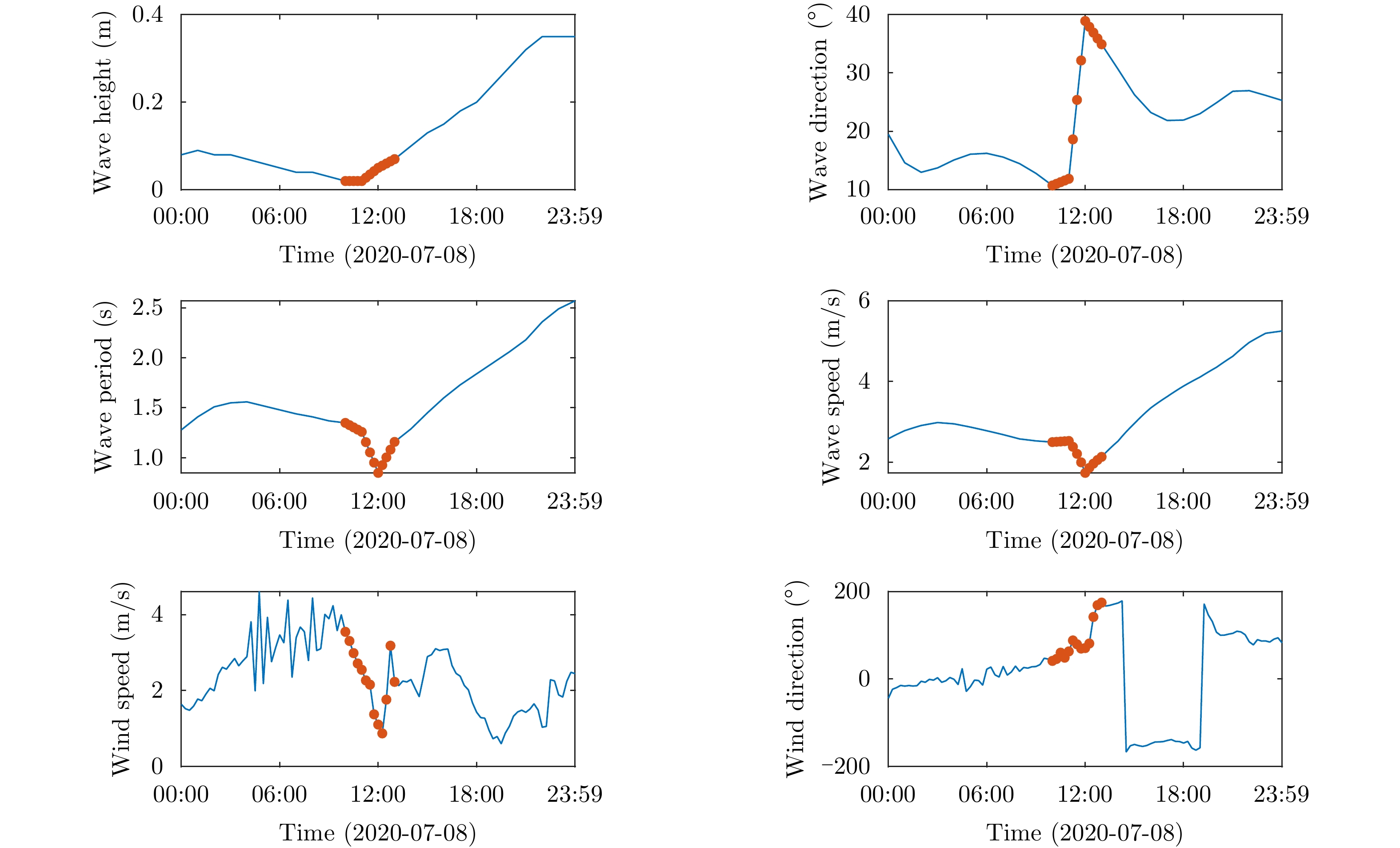
图 3 浪(有效波高、浪向、周期、浪速)和风(风向、风速)要素信息(红色标点对应试验时段)
Figure 3. Wave (effective wave height, direction, period, speed) and wind (direction, speed) information (The red punctuation marks correspond to the experimental period)
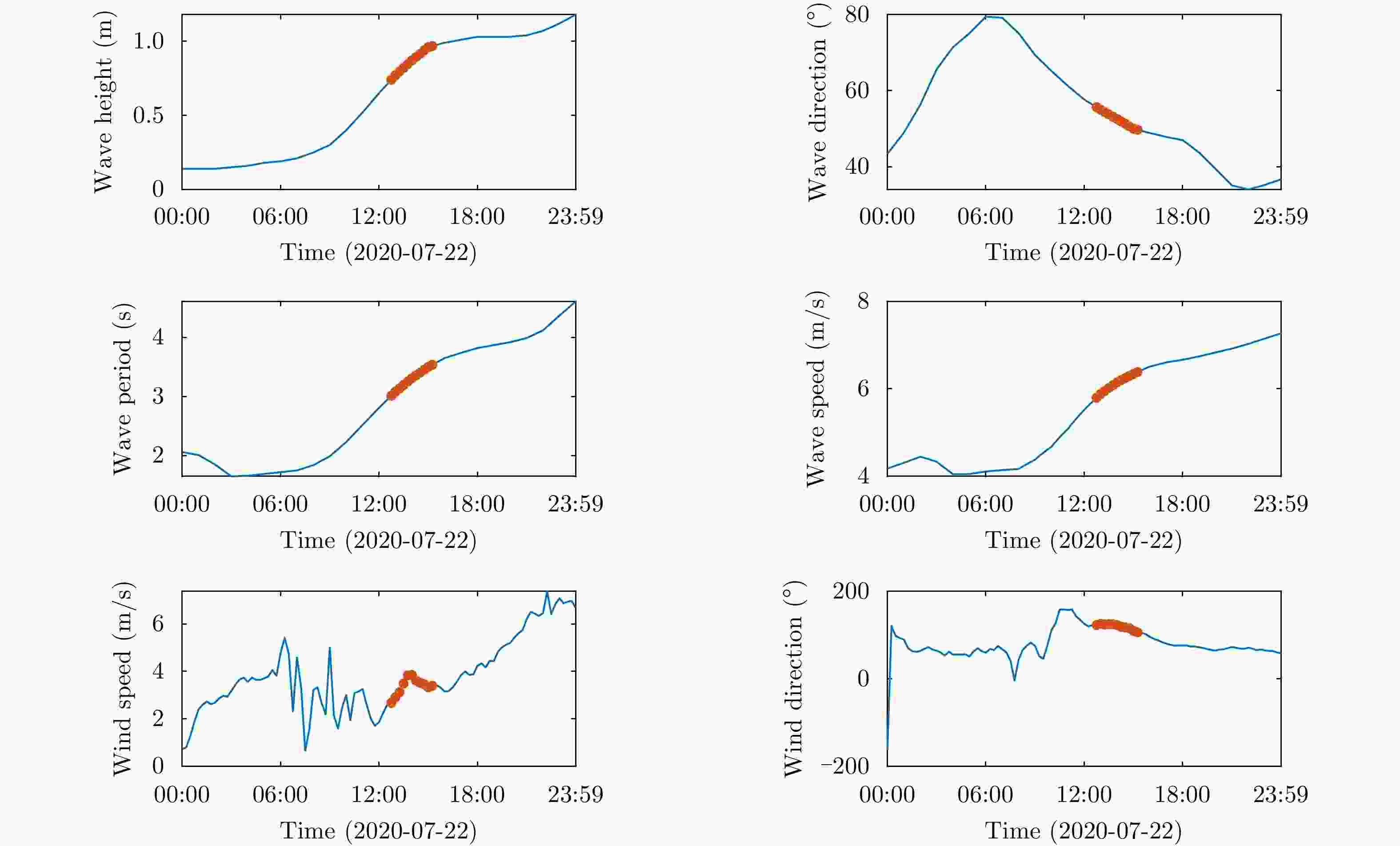
图 8 浪(有效波高、浪向、周期、浪速)和风(风向、风速)要素信息(红色标点对应试验时段)
Figure 8. Wave (effective wave height, direction, period, speed) and wind (direction, speed) information (The red punctuation marks correspond to the experimental period)
表 1 配试船只目标AIS数据示例
Table 1. The sample AIS data of the experimental boat
东经(°) 北纬(°) 时间 121.60965 37.47404 2020-07-08 09:10:00 121.61134 37.47551 2020-07-08 09:38:00 121.61275 37.476685 2020-07-08 09:40:00 121.61628 37.479015 2020-07-08 09:42:00 ··· ··· ··· 121.62507 37.48345 2020-07-08 13:50:00 121.62124 37.480255 2020-07-08 13:56:00 121.61803 37.4774 2020-07-08 13:58:00  下载: 导出CSV
下载: 导出CSV
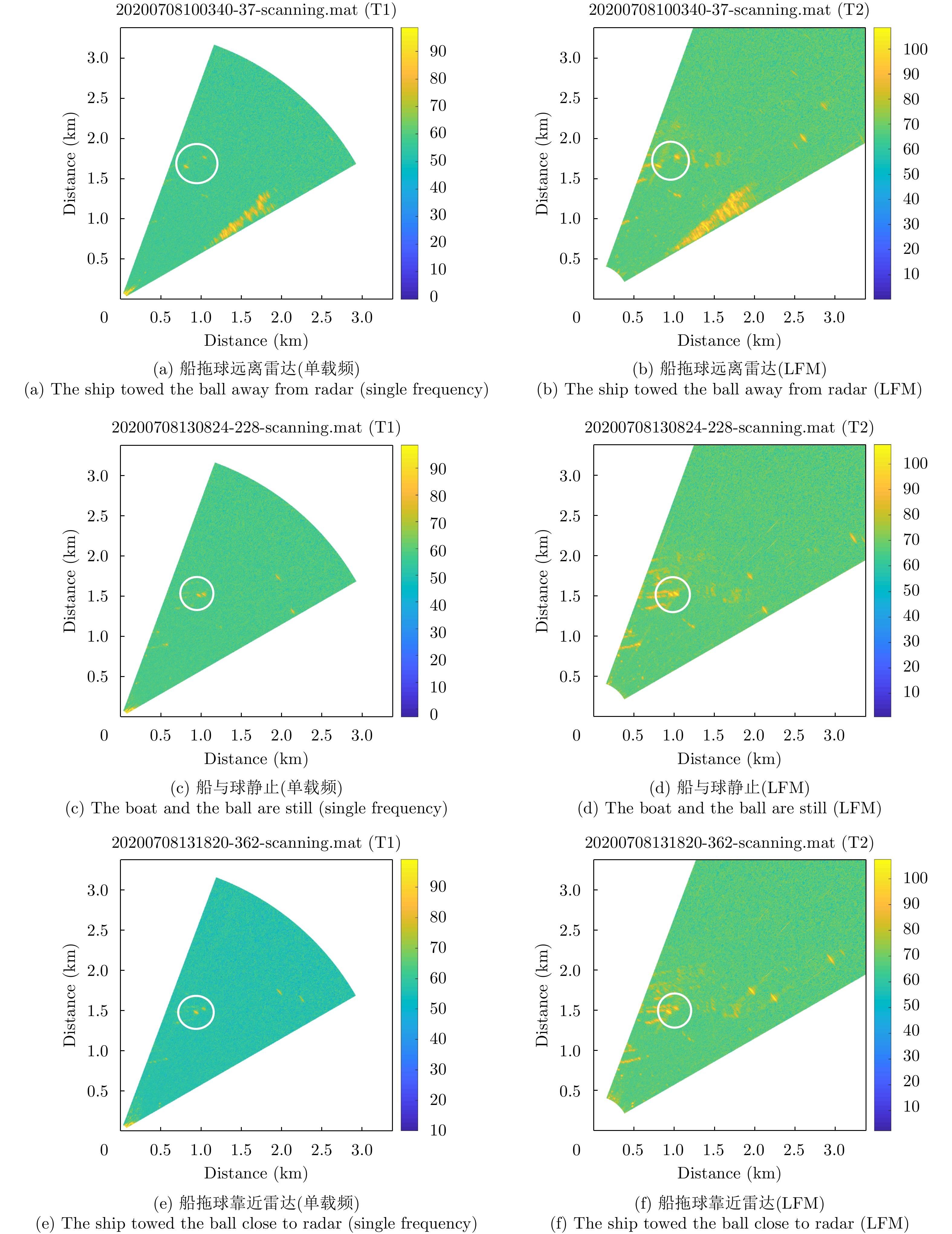
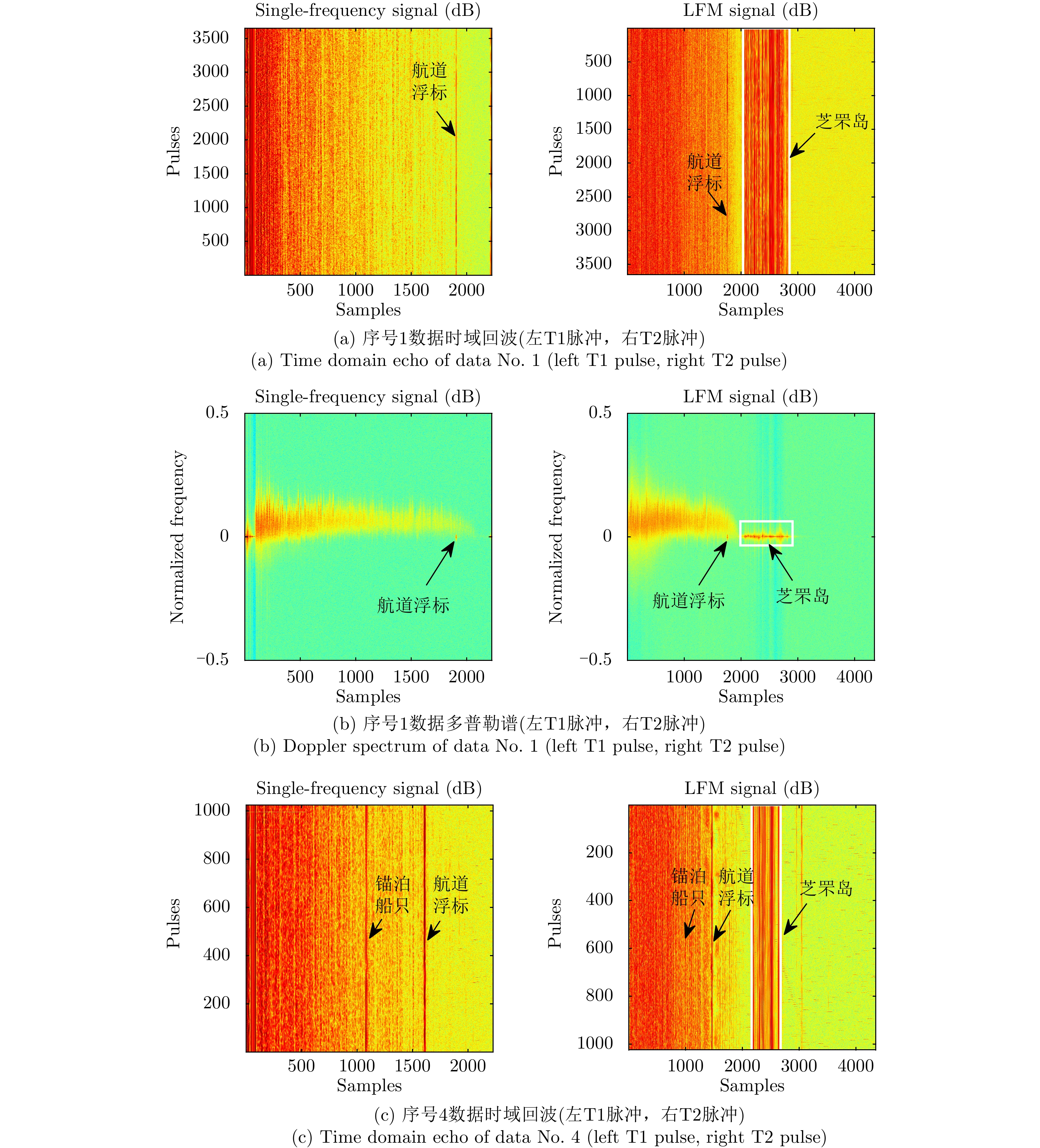
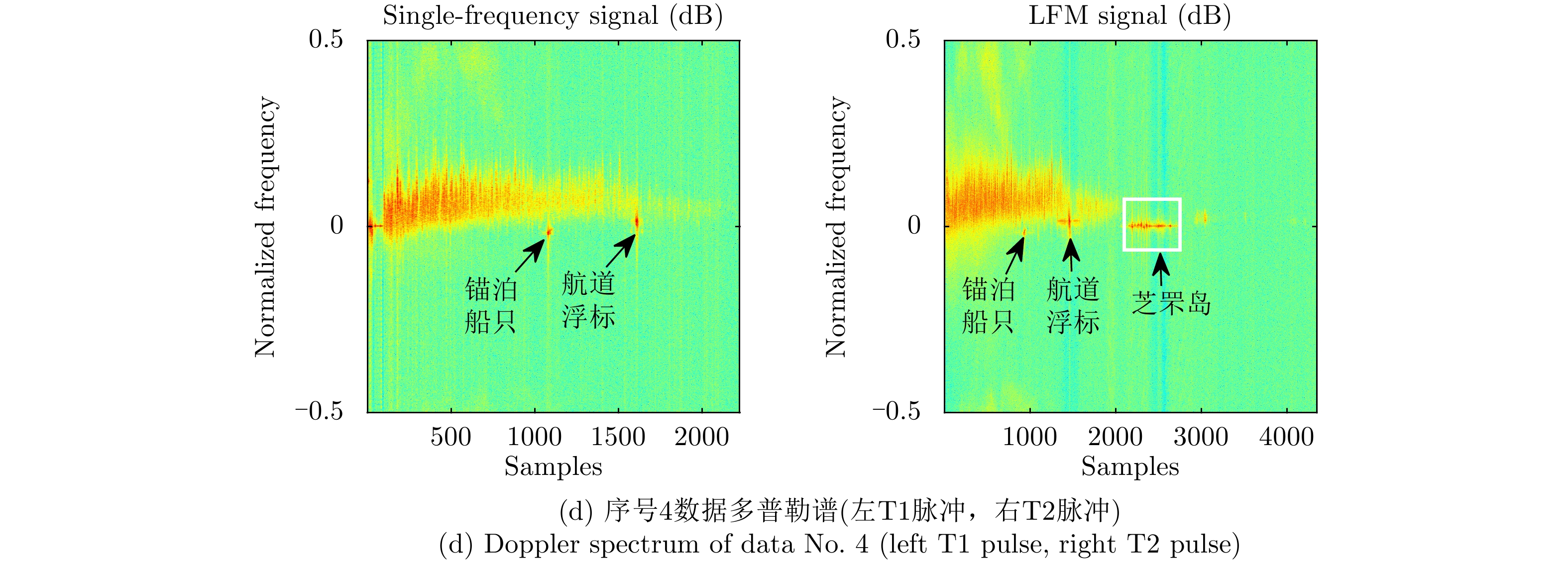
表 2 海杂波与目标回波数据列表
Table 2. List of sea clutter and target echo data
序号 数据类型 海况等级(级) 凝视方位(°) 脉冲个数 描述信息 1 海杂波 3~4 1.53 >104 4.84 km处有一个航道浮标 2 海杂波 3~4 42.18 >104 纯海杂波 3 海杂波 3~4 48.36 >104 近程为纯海杂波,6 km后有岛屿回波 4 海杂波+目标 3~4 17.36 >104 2.778 km和4.115 km处有2个漂浮目标(船+航道浮标) 5 海杂波+目标 3~4 8.01 >104 2.81 km和4.16 km处有2个漂浮强目标(2艘锚泊船只),5.5 km后为岛屿回波 6 海杂波+目标 2 9.58 >104 小快艇,回波较强,距离8.15 km进入雷达视野而后离开,存在同频异步干扰 7 海杂波+目标 2 58.31 >104 3.86 km和7.15 km处有2个目标(船+岛屿) 8 海杂波+目标 3~4 扇区:257~360
0~1269个扫描周期 24 r/min扫描模式数据,有配套AIS数据
下载: 导出CSV
表 3 配试船只目标AIS数据示例
Table 3. The sample AIS data for experimental boat
东经(°) 北纬(°) 时间 121.4206 37.551258 2020-07-22 14:32:00 121.421776 37.553226 2020-07-22 14:34:00 121.4288 37.561104 2020-07-22 14:40:00 121.43016 37.559105 2020-07-22 14:42:00 ··· ··· ··· 121.43651 37.553654 2020-07-22 15:14:00 121.43177 37.54867 2020-07-22 15:16:00 121.4288 37.547638 2020-07-22 15:18:00
下载: 导出CSV
1 2020年度数据发布信息表
1. Annual data release information table of 2020
发布期号 试验日期 海况等级(级) 数据量(GB) 雷达天线
工作模式发射脉冲
模式目标位置
信息记录气象水文
数据1 2021.01.04~
2021.01.062~4 >10 凝视、扫描 模式2 有距离方位记录 有 2 2020.07.08 1~2 >20 扫描(2 r/min为主) 模式2 有船只AIS数据 有 3 2020.07.22 3 >40 扫描(24 r/min为主) 模式2 有船只AIS数据+5个航道浮标距离方位记录 有 注:① 所有雷达数据均为脉压后的I/Q复数据;② 发射脉冲模式2,对应每个重复周期雷达相继发射1个单载频脉冲和1个LFM脉冲;③ AIS数据更新周期较长,约2 min更新一次,与雷达目标数据率不匹配;④ 数据格式与2019年度第1期数据格式相同[6]。
下载: 导出CSV
-
[1] 丁昊, 刘宁波, 董云龙, 等. 雷达海杂波测量试验回顾与展望[J]. 雷达学报, 2019, 8(3): 281–302. doi: 10.12000/JR19006DING Hao, LIU Ningbo, DONG Yunlong, et al. Overview and prospects of radar sea clutter measurement experiments[J]. Journal of Radars, 2019, 8(3): 281–302. doi: 10.12000/JR19006 [2] 关键. 雷达海上目标特性综述[J]. 雷达学报, 2020, 9(4): 674–683. doi: 10.12000/JR20114GUAN Jian. Summary of marine radar target characteristics[J]. Journal of Radars, 2020, 9(4): 674–683. doi: 10.12000/JR20114 [3] 许述文, 白晓惠, 郭子薰, 等. 海杂波背景下雷达目标特征检测方法的现状与展望[J]. 雷达学报, 2020, 9(4): 684–714. doi: 10.12000/JR20084XU Shuwen, BAI Xiaohui, GUO Zixun, et al. Status and prospects of feature-based detection methods for floating targets on the sea surface[J]. Journal of Radars, 2020, 9(4): 684–714. doi: 10.12000/JR20084 [4] 贺丰收, 何友, 刘准钆, 等. 卷积神经网络在雷达自动目标识别中的研究进展[J]. 电子与信息学报, 2020, 42(1): 119–131. doi: 10.11999/JEIT180899HE Fengshou, HE You, LIU Zhunga, et al. Research and development on applications of convolutional neural networks of radar automatic target recognition[J]. Journal of Electronics &Information Technology, 2020, 42(1): 119–131. doi: 10.11999/JEIT180899 [5] 陈小龙, 黄勇, 关键, 等. MIMO雷达微弱目标长时积累技术综述[J]. 信号处理, 2020, 36(12): 1947–1964. doi: 10.16798/j.issn.1003-0530.2020.12.001CHEN Xiaolong, HUANG Yong, GUAN Jian, et al. Review of long-time integration techniques for weak targets using MIMO radar[J]. Journal of Signal Processing, 2020, 36(12): 1947–1964. doi: 10.16798/j.issn.1003-0530.2020.12.001 [6] 刘宁波, 董云龙, 王国庆, 等. X波段雷达对海探测试验与数据获取[J]. 雷达学报, 2019, 8(5): 656–667. doi: 10.12000/JR19089LIU Ningbo, DONG Yunlong, WANG Guoqing, et al. Sea-detecting X-band radar and data acquisition program[J]. Journal of Radars, 2019, 8(5): 656–667. doi: 10.12000/JR19089 -






计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

